Hey everyone,
We’ve had some optical flow and EKF altitude estimation anomalies and would like some help diagnosing these issues.
Here are the optical flow readings from testing our vehicle, disarmed and not flying.
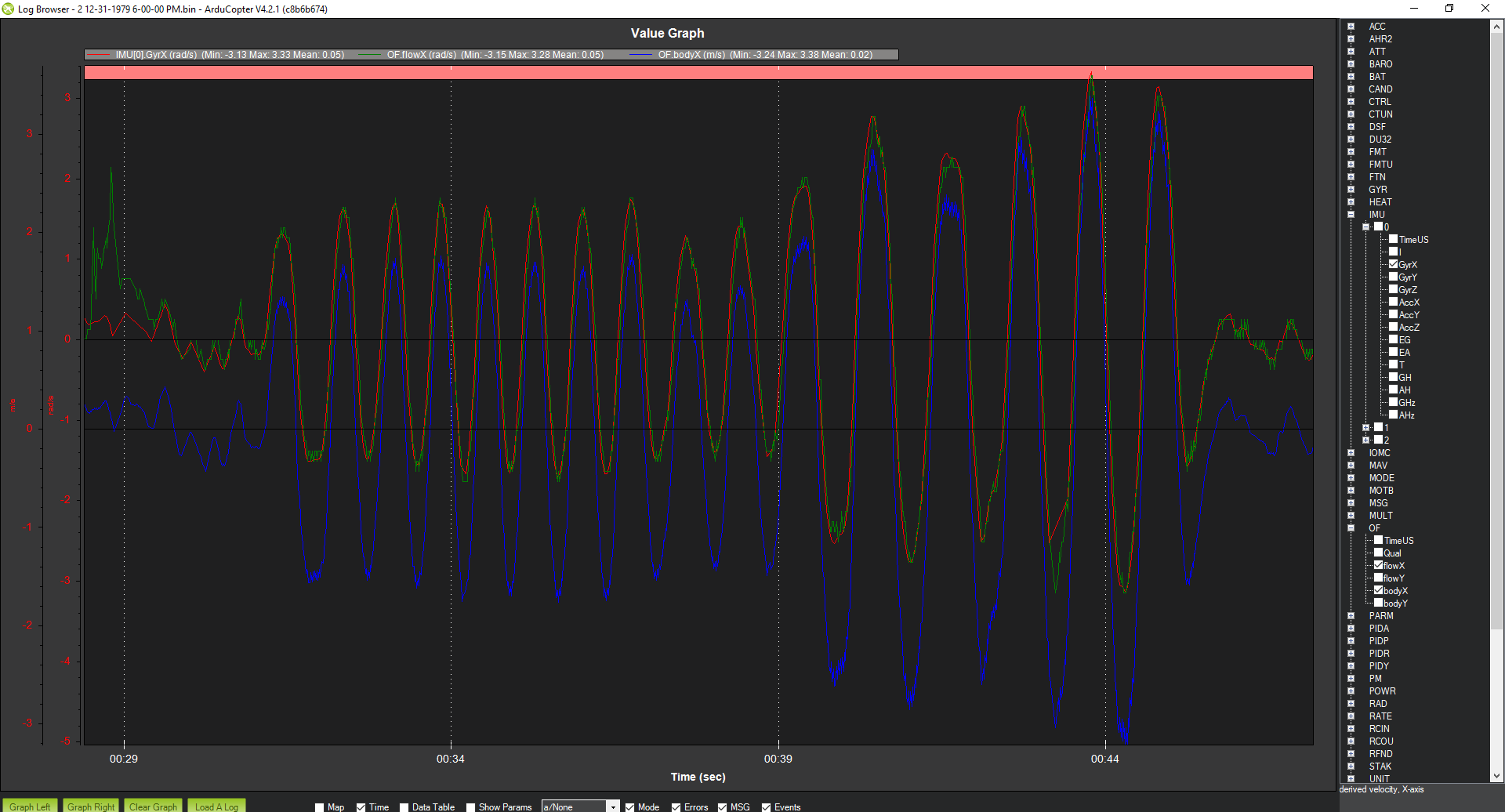
Notice that the flowX data is fairly smooth and precise, having a resolution of roughly ± 0.1 m/sec
The EKF sources are set to optical flow and rangefinder only. GPS is disabled.
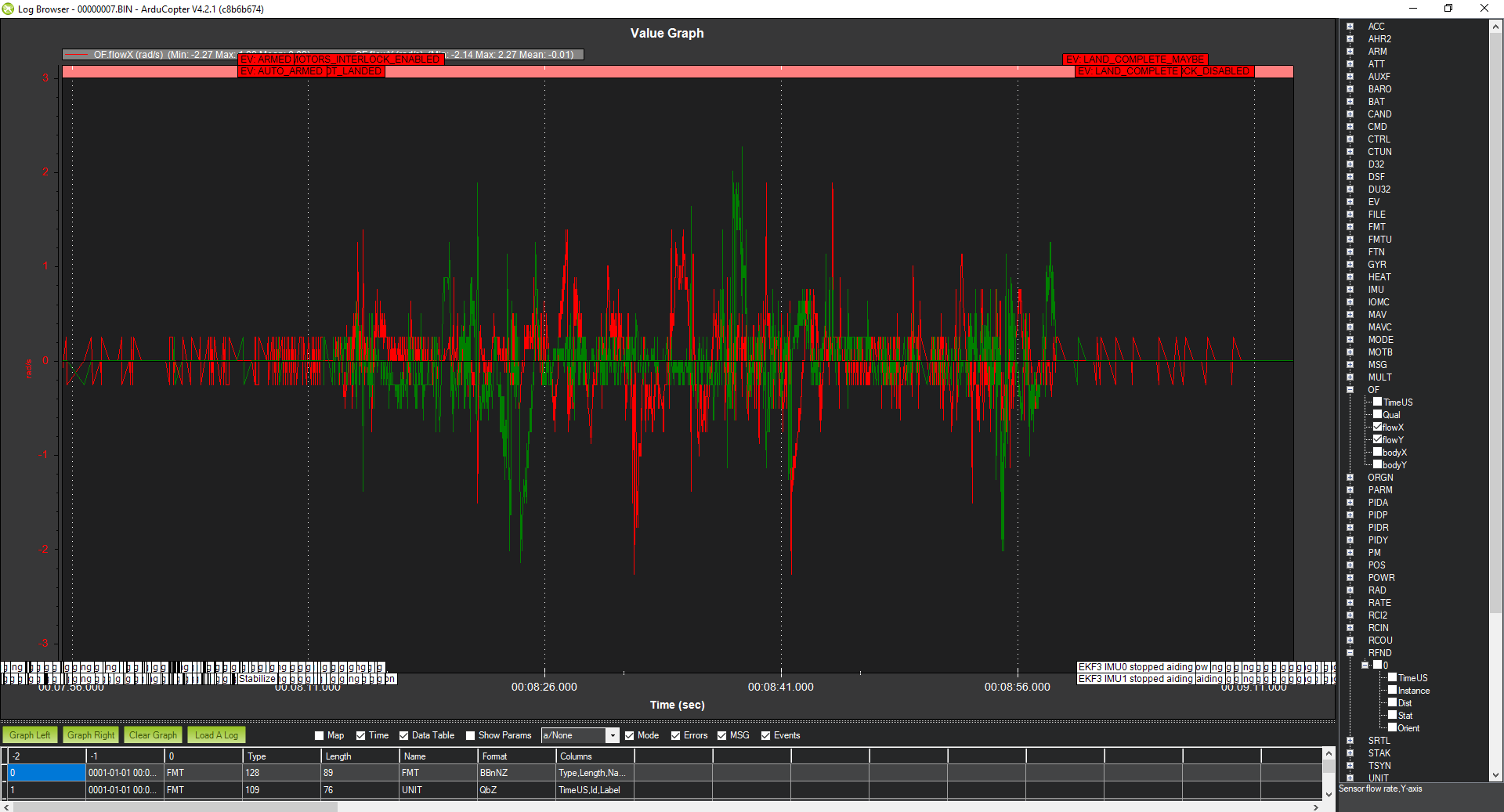
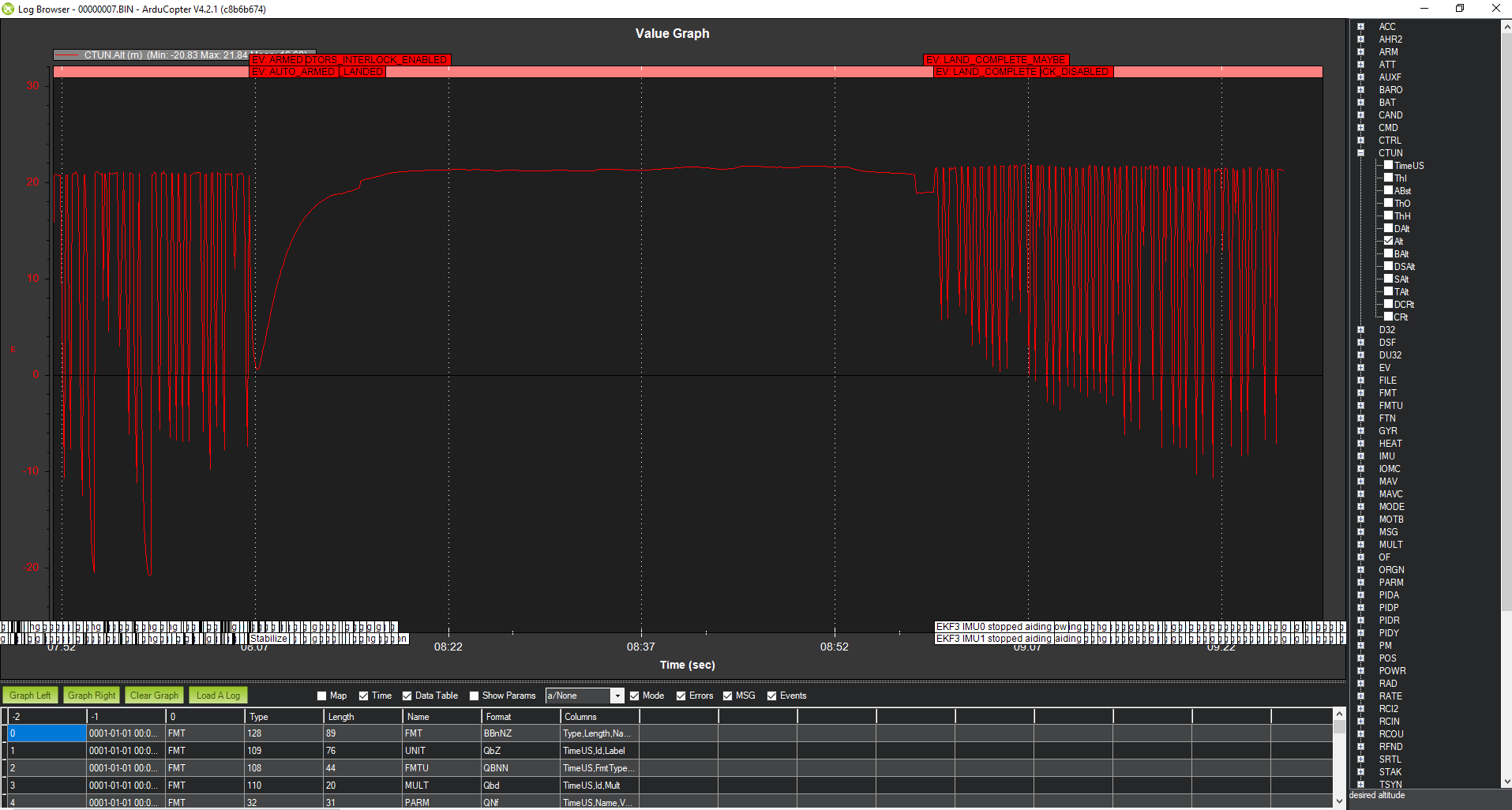
When we are flying vehicle 1, the optical flow flowX data precision is less precise and is much more jagged and discrete. In addition, the EKF altitude estimation is jumping significatly between -20 meters and 20 meters.
We have had similar issues on other vehicles using PX4Flow and ArkFlow optical flow modules.
The EKF sources are set to rangefinder and optical flow only, but the altitude jumps are largely mitigated when GPS is in the loop.
Any help diagnosing and fixing this issue would be appreciated. Our leading theory is excessive vibrations on the optical flow unit during flight, but open to other explanations. Log files posted below.
https://drive.google.com/drive/folders/1c7rmWnyLLKo4QM5ur-C6Nf17n6nZxdXb?usp=sharing