Connecté à Betaflight, est-ce que l’on peut récupérer les infos GPS comme le fait DJI avec son Air Unit ?
Ce serait carrément cool.
Connecté à Betaflight, est-ce que l’on peut récupérer les infos GPS comme le fait DJI avec son Air Unit ?
Ce serait carrément cool.
C’est a dire que l’on injecte le code dans une petite carte comme ça ? : https://fr.aliexpress.com/item/32808738325.html
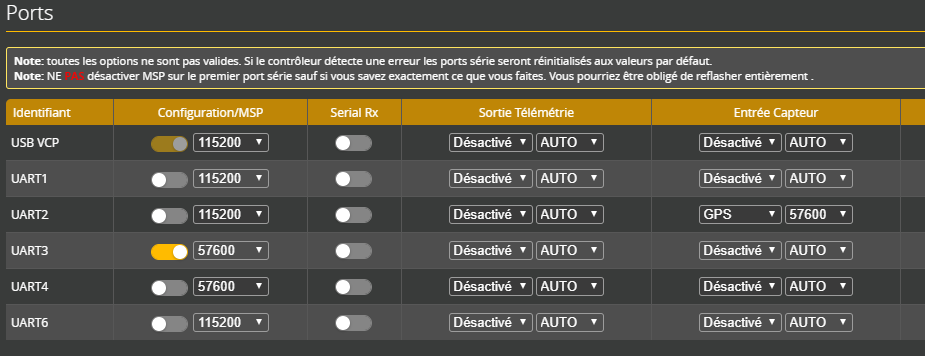
Le port MPS, c’est ce que l’on retrouve sur les cartes de vol que l’on utilise sur les racers sous “Betaflight” ou “Freeflight”, les ailes volantes sous “INAV” ?
Ça devient intéressant aussi, puisque visiblement avec la législation européenne qui va être mise en place, même les machine entre 250 gr et 800 gr devront être aussi équipées d’un module de signalement, et là, vu le poids et la taille, c’est pas trop un problème
Si j’ai bien compris, il faut un petit dowloader de ce type pour téléverser le code dans la carte : https://fr.aliexpress.com/item/32799975353.html
Oui, c’est du MSP “Multiwii Serial Protocol” donc cela devrait fonctionner avec Betaflight ou Inav.
Pour le USB serial qui sert à programmer l’ESP01 on en trouve qui ont déjà un inter… sinon sur celui que tu as mis en lien il faut ajouter un inter.
Pour les appareils DJI ça doit être possible de se repiquer sur le fil Tx du GPS d’origine pour avoir les infos.
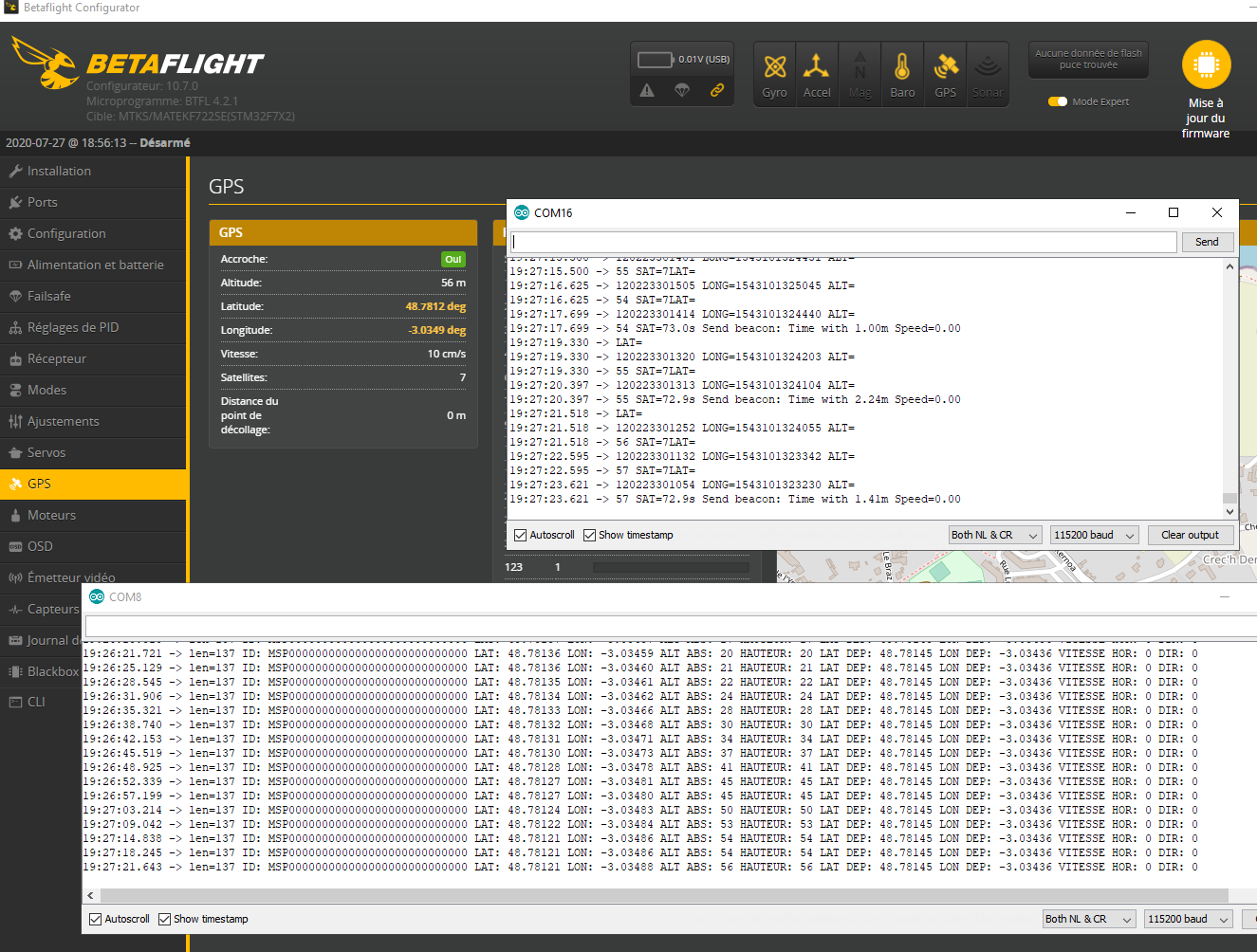
ça a l’air de fonctionner 
Sur l’ESP01 il y a une led bleue qui s’allume lors de l’envoi de données sur la console, au démarrage le temps que le MSP se mette en place ça clignote toutes les 0.5s (timeout), ensuite toutes les 1s lors de l’acquisition des satellites puis toutes les 3s lorsque c’est prêt.
Edit: par contre c’est bizarre d’avoir l’altitude identique à la hauteur… c’est le sniffeur ?
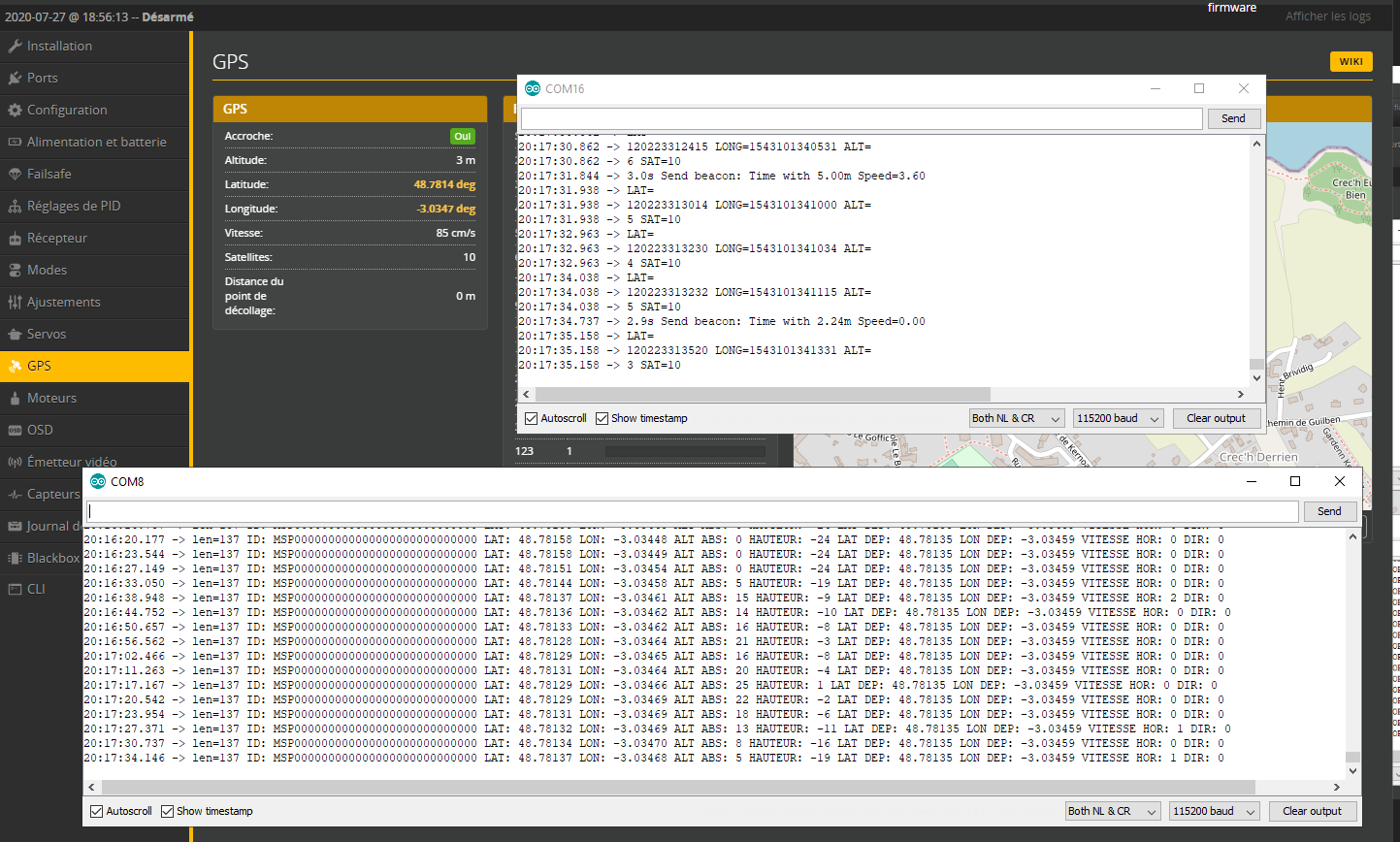
Ce n’est pas toujours le cas, preuve que l’altitude <> hauteur :
Après le GPS est à ma fenêtre, je ne sais pas quelle est la valeur du HDOP mais vu les variations d’altitude il est dans doute mauvais, je suis près de la mer à une altitude d’environs 15 mètres et cette valeur bouge beaucoup comme tu peux le constater.
Ok, il avait mis le home à 0 msl ce qui est un cas improbable ici 
J’ai essayé sur mon P3A, la trame GPS est du type binaire et n’est pas décodé par TinyGPS. Elle serait décodé par la version MSP ?
Les GPS DJI communiquent avec la carte via un protocole propriétaire.
https://www.rcgroups.com/forums/showthread.php?1995704-DJI-NAZA-GPS-communication-protocol-NazaDecoder-Arduino-library
Edit : @silicium81 Si tu veux tester, faut que je remette la main sur un GPS DJI…
Les GPS DJI sont des ublox normalement, donc il faut simplement une librairie qui comprenne le protocol ublox !
Sur les séries Naza le module GPS est un Ublox mais il y a un microcontrôleur intercalé qui dialogue avec le GPS et le magnétomètre puis envoie les données à la carte avec un protocole “DJI”.
Idem pour les séries Phantom , Phantom 2 et 3.

@TigerWill non, pas sur Paris… faut que je fouille 
J’avais fait quelques recherches en ce sens, sans trouver quelque chose facilement utilisable.
C’est fort possible. En tout cas, la trame n’était pas du NMEA. J’ai donc ajouté un récepteur GPS pour la balise.
C’est fort possible. En tout cas, la trame n’était pas du NMEA.
C’est même certain ![]()
La balise “DJI” semble fonctionner correctement, le repo est mis à jour.
Compiler avec l’option CPU Frequency = 160Mhz , nécessaire pour le softserial @115200bds
Je n’avais pas vu ton post ! ![]()
C’est excellent ça ![]() Une balise à 2€ pour les drones DJI
Une balise à 2€ pour les drones DJI ![]()
J’ai refermé mon P3A, je vais le rouvrir pour tester !
Pas certain que cela marche pour le Phantom 3, tu peux mettre une photo du GPS ?
J’ai des erreurs de compilations avec la librairie NazaDecoderLib, faut que je creuse…
Pour le P3A toutes les infos sont ici:
Sinon, j’avais bien des données à 115200 bits/s
Il semble que le format c’est du u-blox… Reste donc à le décoder.
Une piste ? https://www.arduinolibraries.info/libraries/ubx-gps
Tu n’as pas besoin d’ajouter le librairie, juste cloner le repo.
A priori le protocole GPS DJI a été utilisé jusqu’au Phantom 2 / Naza v2
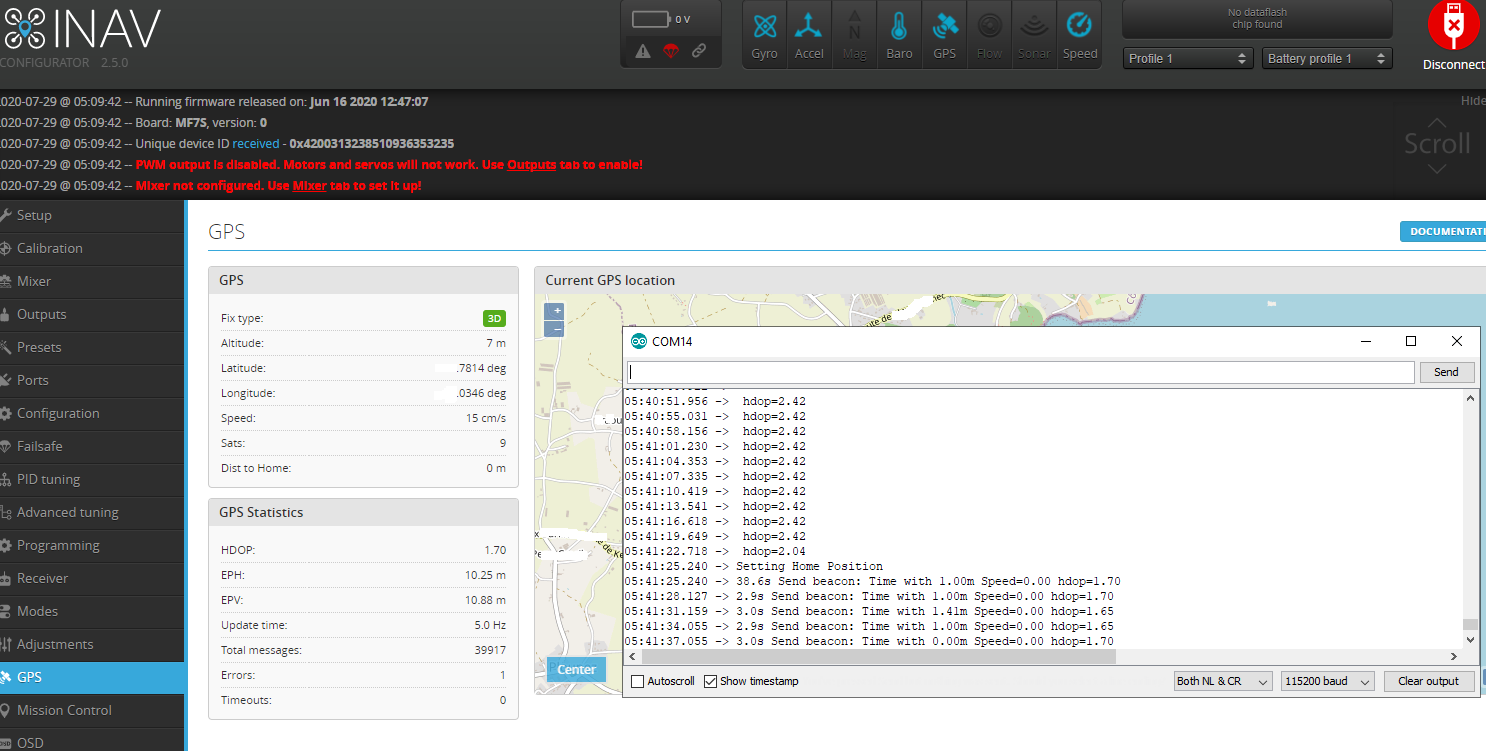
INAV gère correctement le HDOP
Du coup j’ai poussé une version qui en tire partie pour initialiser la home position : https://github.com/dev-fred/balise_MSP_INAV