Hello,
Running an interesting experiment and trying to determine feasibility of an odd configuration change.
I have a large H-8 config octocopter with following:
Holybro PH4
Arducopter 3.5.3.
Mission Planner 1.3.56
For an upcoming test, I’d like to spin ONLY the bottom rotors of the craft (while it is secured to the ground) to take some downwash measurements.
I understand that I can change FRAME_CLASS to 1 (quad), but that will only spin the top 4 rotors. Is there a parametric way to also change the motor mapping (ex. pin 5 pwm --> motor A) so that I do not have to alter hardware connections, or is that hard-baked into the firmware (my current understanding)?
Note: I know of the motor test tab in Mission Planner but need motors to spin continuously for 5+ minutes at a time and the motor test tab has a timeout of ~1min in my experience (w/ MP 1.3.56). If there’s a way to override this max timeout that would be even better, even if this involves an updated MP/ Arducopter.
DON’t USE 3.5 Copter, Use 4.0 or if you absolutely paranoid use 3.6.11
Use latest Mission Planner as well
What about unplugging the signal wires from your controller ? You can easily pull out the wires from the JST connector with a help of a needle, and simply push back once you finished.
Use stabilize mode, and arm, then you can change the throttle manually.
@Eosbandi I was wondering if there was a non-hardware way to perform the bottom-spin only, as unplugging cabling is quite difficult given the test rig.
What is issue with 3.5? Have been using for a few years with great success, and have found some upgrades to get rid of or add features wantonly.
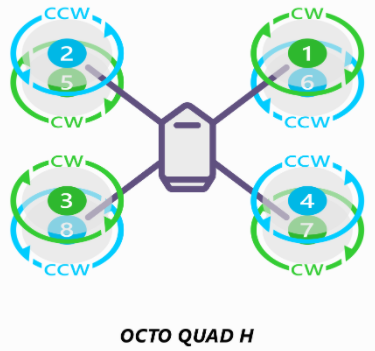
Servo#_Function should work for this use case. The values go from 33 to 40 to designate motors 1 to 8 respectively (based on the following diagram).
So, assuming you have the standard setup, you would just to put Servo1 - Servo4 parameters to a value of 0 to disable those outputs. Make sure to change back before flying lol!
3.5 is very outdated and their have been a lot of major changes the increase system reliably (e.g. less crashing). Even if you don’t need the features - you should always try to be on the latest stable version (i.e. 4.0).
Apologies for the ghosting–thanks for your servo response, did the trick!
Appreciate all time taken to answer my question from all responders–have a great holiday.