I got my rover (4wd crawler with servo steering) set up today with a cube and here2. In manual mode it drives only forward. When I put it in auto, it seems to go to the waypoints but in reverse and drives in circles. I’m using a Taranis X9D.
Here’s the Log Here’s the Params crawler.param (14.2 KB)
I have the hobbywing ESC set up for F/R as the wiki suggests.
Check servo output function in your mission planner. Reverse the channels which is behaving this way.
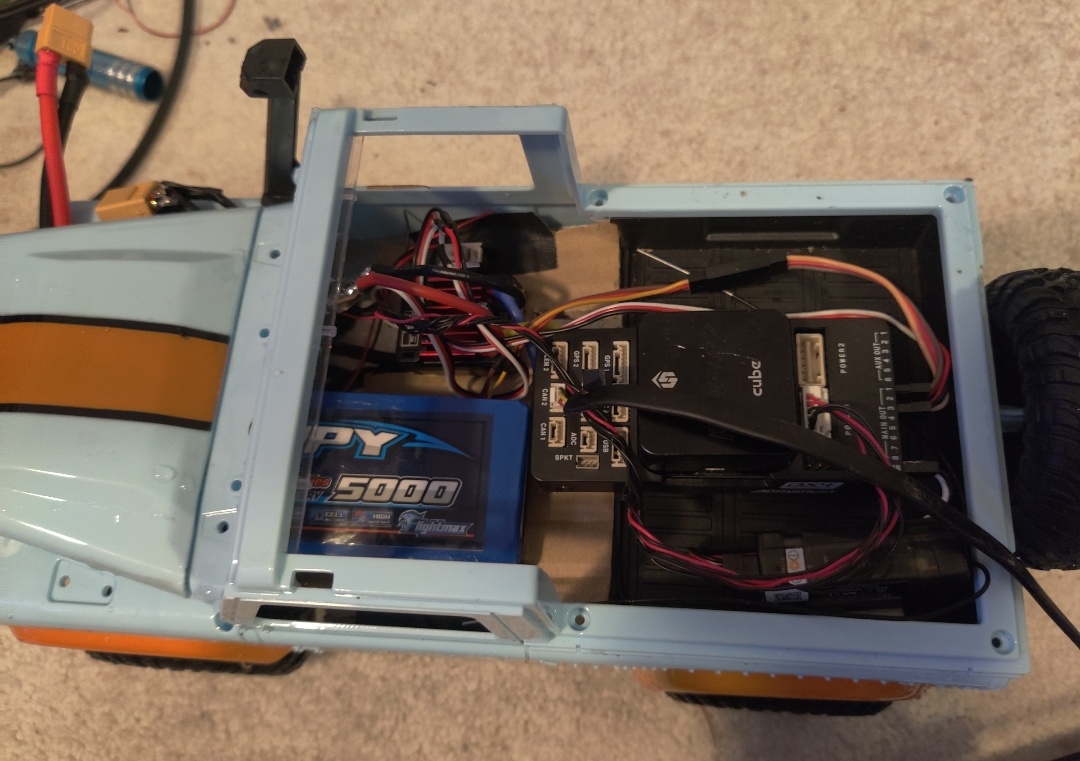
Also if possible can you post few images of the build internal and external?
Check that the direction of FC installed in the boat.
Cheers! Shubham Thakur
Direction of the fc is correct. I got it to drive both directions in manual, but it still goes backwards in auto.