Hi guys, today I was trying to launch a “new” (actually older but newly converted) copter for the first time and encountered a problem I’ve never had before: One of the motors simply won’t spin up.
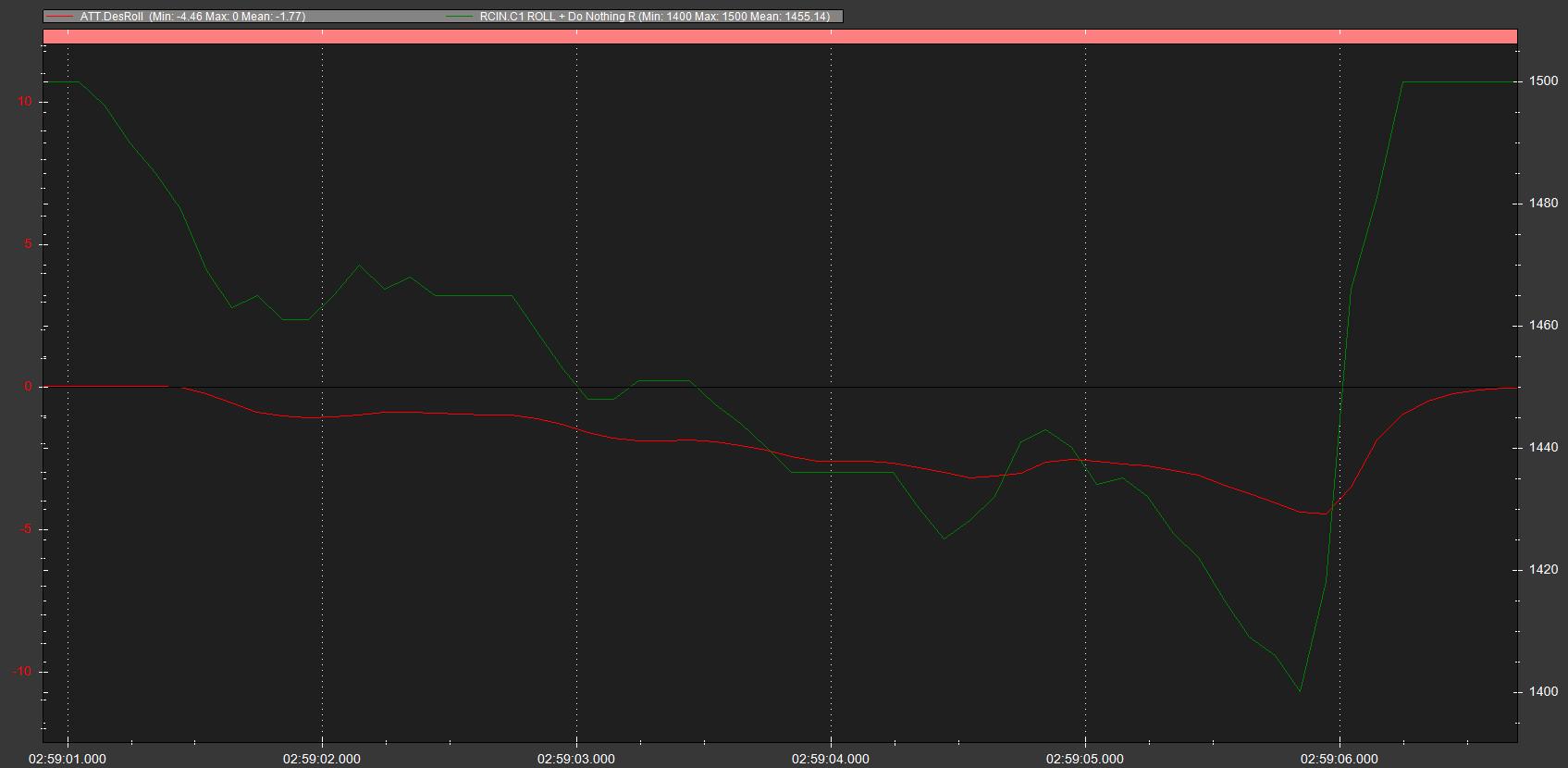
It looks like motor2 is not going above arming throttle because the whole time the copter has been sitting the pitch (and roll) has been changing. Maybe reboot just before arming if outside temperatures are low and the copter has been sitting - this will allow the baro and the gyros to reset at the lower/stabilised temperature.
But anyway…
maybe the MOT_SPIN_ARM is a bit low for these motors and ESCs. Go back to MissionPlanner motor test and check all motor positions and spin directions (why not?) and recheck the lowest percentage required for smooth startup of all motors. Set that value as MOT_SPIN_ARM , then and add 0.03 to that value and set that as MOT_SPIN_MIN.
Thanks, I did all that now and will try again tomorrow. Kakute F7 has always had the weird issue of gyros going crazy on the bench - always moving at insane speeds, rolling and diving, according to MP. But outside, when actually flying, my other copter running this board never had any issues.
In any case, I added some “gear” (zip ties) below the arms now, so the copter is more levelled when trying to launch. It was leaning to one side heavily due to a crude, self-made li-ion battery below the frame, which is not exactly flat.
I just checked the video I filmed (it was supposed to be a maiden flight) - it’s definitely the lower right motor not spinning, as seen from behind the quad. Isn’t that supposed to be motor4/B?
First there were RX/CRSF telemetry problems, and even after rebinding twice telemetry in Yaapu was still locking up. I wonder if there are issues again with Crossfire Nano Diversity receivers?
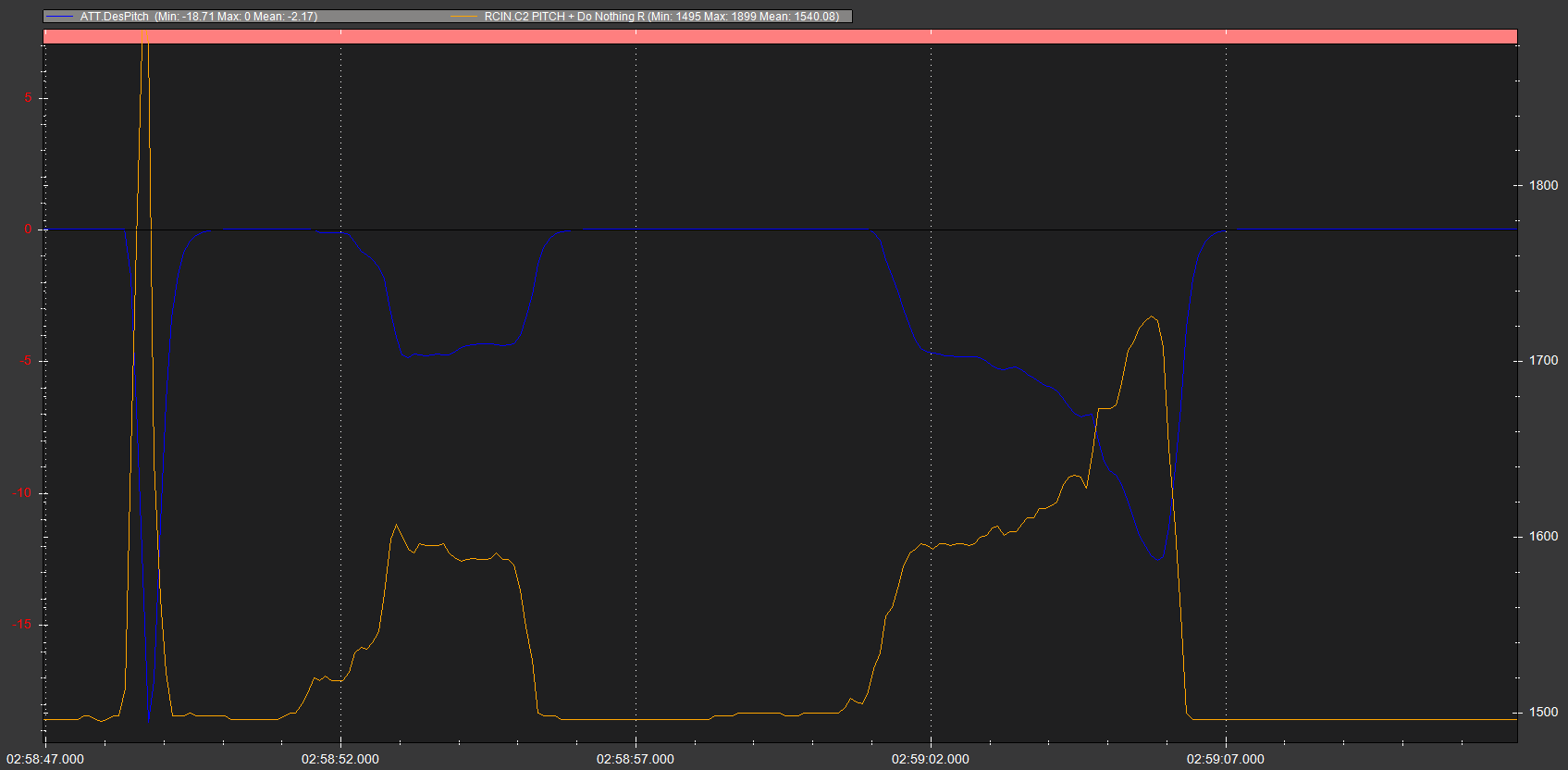
RC was working at least, so I gave it another try. This time all motors spun up correctly, but as soon as the quad had left the ground it started speeding forward, even pulling back full on pitch didn’t help.
Gyro calibration looks ok to me, horizon was level in OSD on launch. There was some wind from the back but not enough to blow away the copter. This quad used to be my most used one, until it crashed due to iNav two years ago.
Vibration looks low enough to me?
This is actually the first time I have to do some real troubleshooting in AC - my first 2 Arducopters flew well from the start, even before Autotune. So I’d be really thankful for some hints…
Thanks a lot! It’s a bit weird though because this model is in fact a copy of another ArduCopter which is working fine, even running same FC and RX. That’s why I’d never have guessed at something this simple. I just re-did the radio calibration and even then I didn’t notice the pitch being reversed…
As for CRSF telemetry, it worked immediately and permanently on the bench, so I didn’t investigate any further for now. In any case I think I can rule out interference in the field as other models with Nano RX always worked fine there.