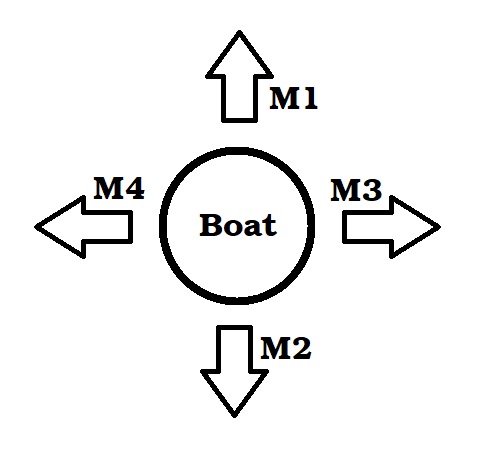
Hi! I’m planning to build a boat using the motor configuration as shown in the picture, I know it can’t YAW with this configuration but it does not needed for what I want to use the boat. My idea, it could use compass and GPS to navigate like the “headless mode” on quadcopters. It requires lateral movement and mixing the thrusters to do that, I know autopilot does not support lateral movement right now in AUTO mode, but is it will be in the future? What motor configuration from the omnivehicles should I use for this? Thank you if anybody can help me with this!