When my copter performs the RTL command the landings are sometimes very accurate and sometimes 2 m off. This also occurs when I test it and perform RTL several times within 5 minutes.
This is an issue which is relatively new, with older Arducopter versions (e.g. the first 4.0 version) I did not have the issue. I’m currently using 4.2.3.
I use a dual GPS setup with a F9P and M9N and the “use best” setting. But the problem was present before I added the F9P.
I think that it is probably connected to the use of EKF3 or the WP_RADIUS setting.
Sorry for the vague description. Did anyone experience similar issues and did solve it?
I have found that the GPS lat/lon position differs from the “POS” position and that this offset could be the cause of the deviation during the landings.
Is it possible to give more weight to the GPS position? I could not find a suitable parameter.
I have fixed the 2 m deviation by choosing the right primary GPS (0 instead of 1) but I’m still 1 m off and think 0,3 m should be possible. Since I did achieve such precision before with previous firmware versions.
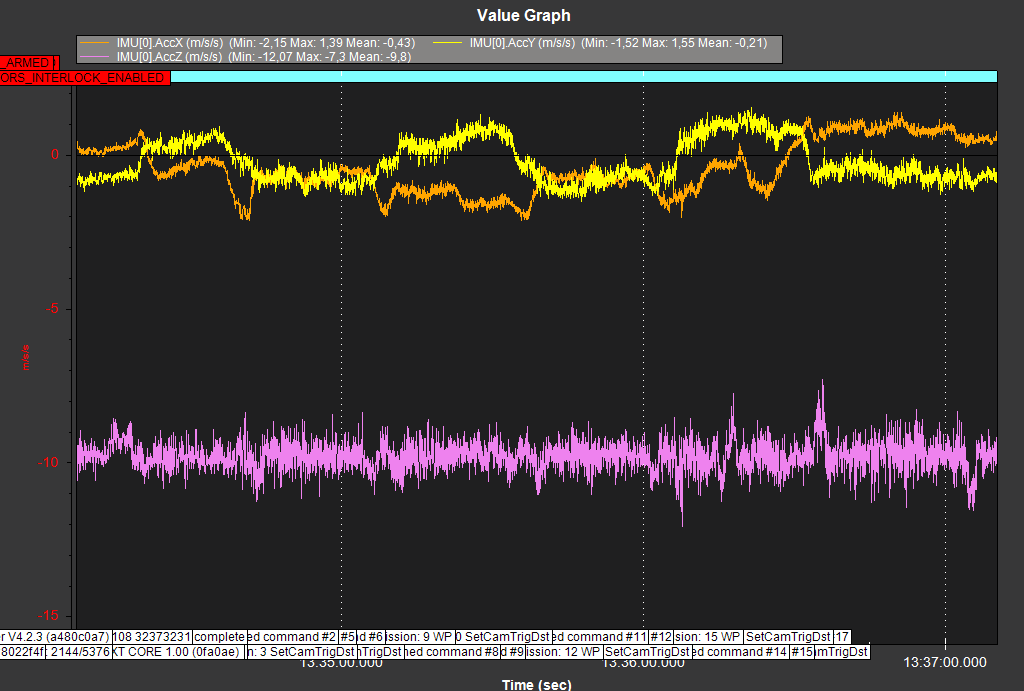
The vibration level ist within the acceptable range.
Hold off on changing anything about EKF.
First update to latest stable firmware.
The IMU Acc graphs are not the same as vibration.
Care to provide a .bin log?
I’ve found it’s best to determine which GNSS unit is the most reliable and accurate and set it as the primary
then set
GPS_AUTO_SWITCH,4
to minimise switching between the two units, and the secondary will only be used if it is really needed.
Also it can help if you have used
GPS_GNSS_MODE and GPS_GNSS_MODE2
to select the best 2 constellation for your region.