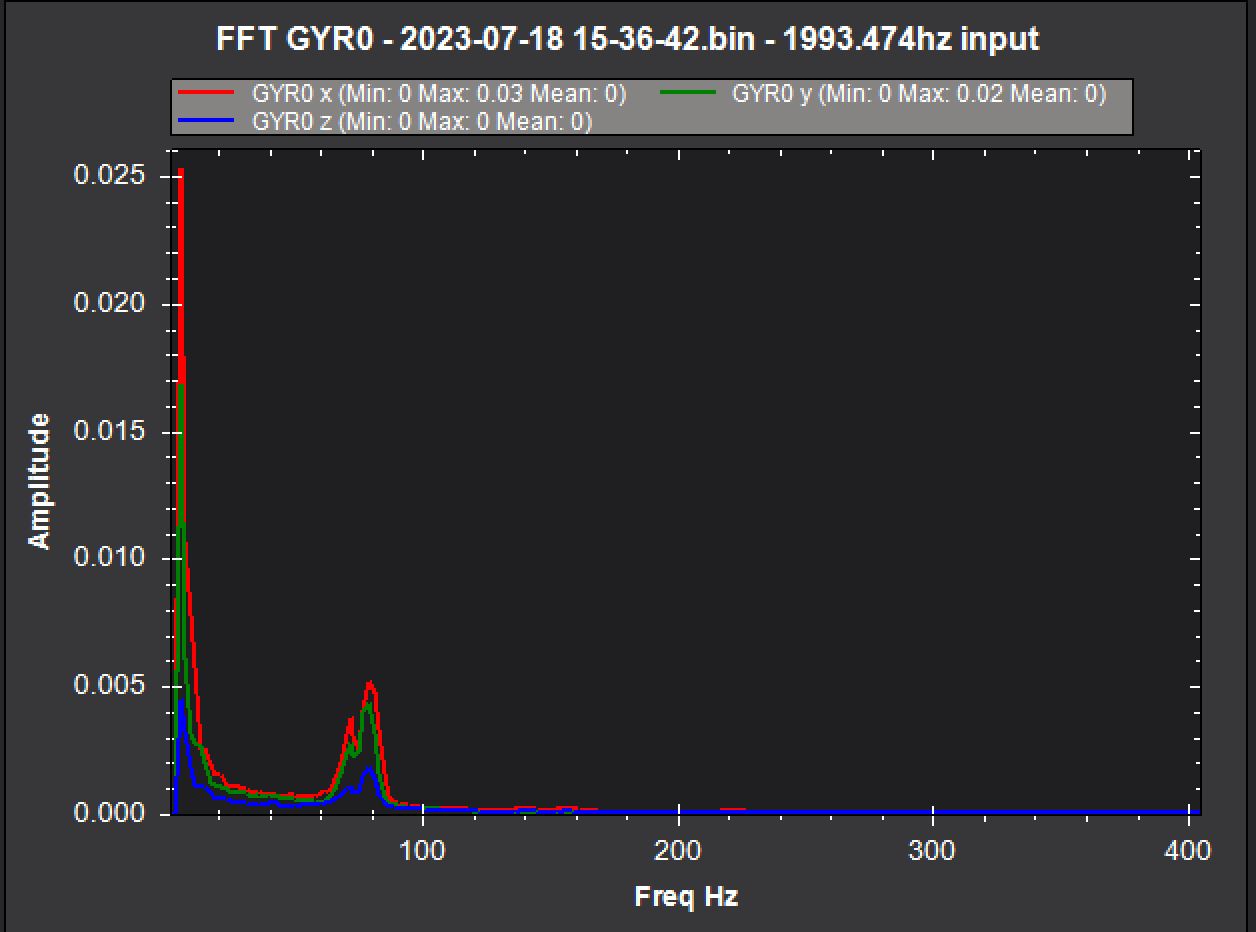
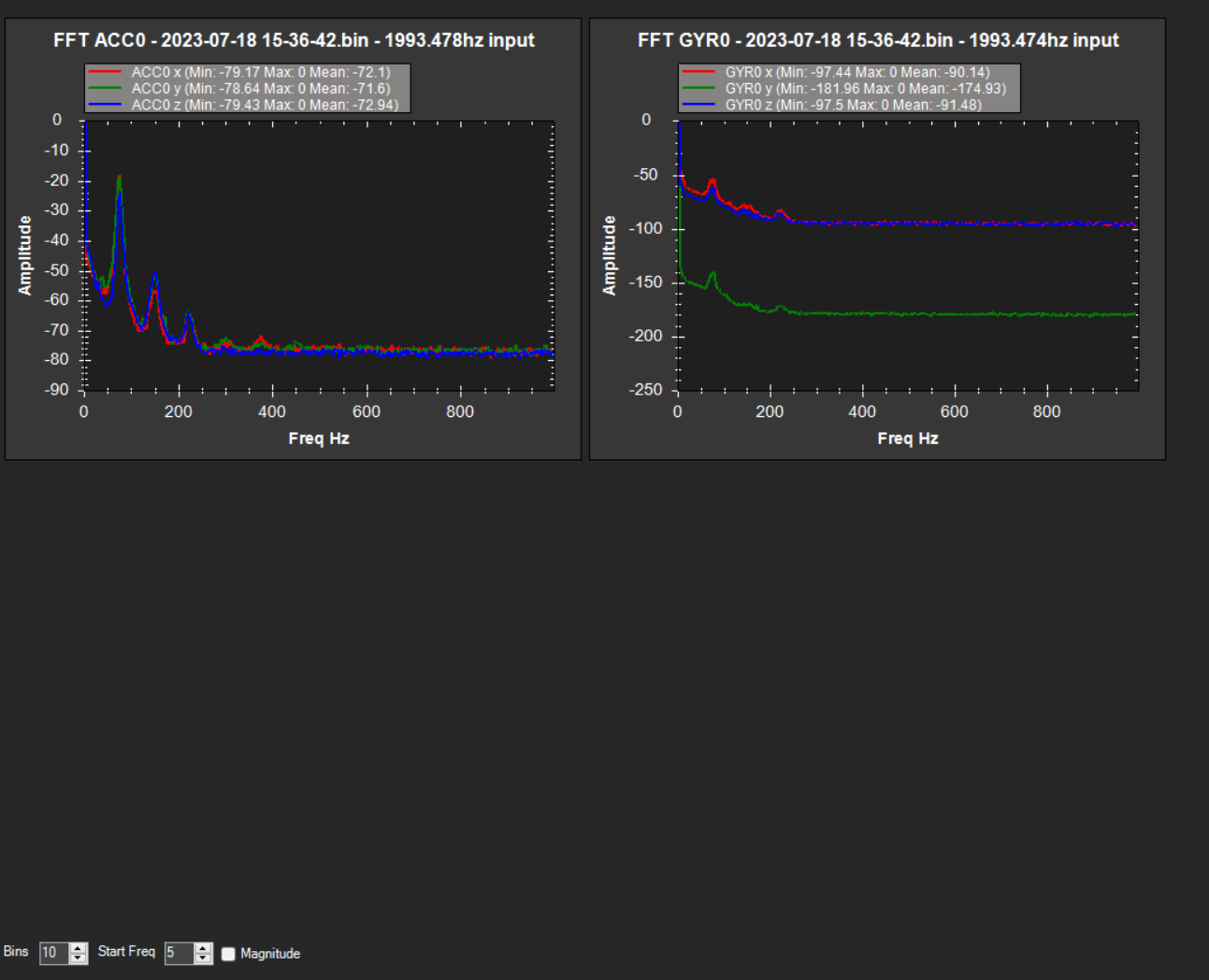
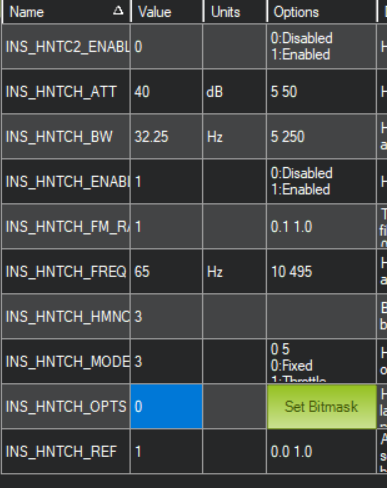
I tried a esc telemetry based notch filter on all 4 motors, but it was weird flying lol. So I set INS_hntc_opts from 2 back to zero. I tried setting the ins_hntch_freq to 1/4 . I presume I would do the same with the BW. That didn’t help lol. Anyway, with the filter averaged on the 4 motors it seems to attenuate a fair bit. But my Z and X gyro are way above my Y.
And a log file if anyone’s interested : )