New Cube Orange Plus autopilot and sensors. Was using 4.3.7 for described flight, I have not loaded 4.4.0, VTOL airframe, well tuned, tested stall speeds and has had 4 flights, most are doing this:
During climb out (VTOL as in helicopter mode going up) you can see the elevator causing a pitch up. I mean the servo is hard over to make the plane’s nose go straight UP.
- It’s NOT EMI, I’ve moved wires, disabled radios and swapped the elevator servo, as far as I can tell it is not electromagnetic interference.
- During/just after transition there is a violent pitch up which the aircraft can and has recovered from, it’s at least 90deg UP.
- If I let it continue the flight I will eventually LOSE PITCH CONTROL via my hand held transmitter, the bird will be commanded UP by me but the servo is not reaching the full UP position.
- The autopilot is commanding UP but the bird is not pitching up.
- Related?? I occasionally get the “PreArm: AHRS: not using configured AHRS type” error. My autopilot is BACKWARDS installed and the orient parameter is correctly set.
- When this error of “not needed” pitch up (which can occur while the hardware safety AND the software safety switches are DISARMED by rotating the bird by hand) there is the “toilet bowl” effect going on!
There is the violent pitch up during takeoff transition AND when the bird has recovered from that and has flown for a minute or two it will try to pitch DOWN and will be countering any manual UP I give it as well as any UP the autopilot is giving it. In other words, for this failed flight, it was all I could do to make the elevator to be near the neutral position.
Re-calibrating the accelerometer and the magnetometer (don’t know if both must be re-calibrated) seems to have gotten rid of the violent pitch up done by the servo (who knows what the autopilot is telling that servo) during hovers but I will not put it back into the air for further testing until I understand this problem.
My thoughts: The only time I’ve ever seen the elevator go full pitch up is when the aircraft thinks it is going straight down, as in it is so close to “straight down” that the elevator snaps to that position. I’m thinking that the accelerometer is “confused” during normal flight. OR maybe a bug that is causing the autopilot to not remember that my autopilot is installed backwards for a few seconds?
C2 is my elevator channel.
Airframe is a VT Bird, Tilt Motor configuration
Just in case this helps here is the messages I get after a few minutes of warm up while in doors:
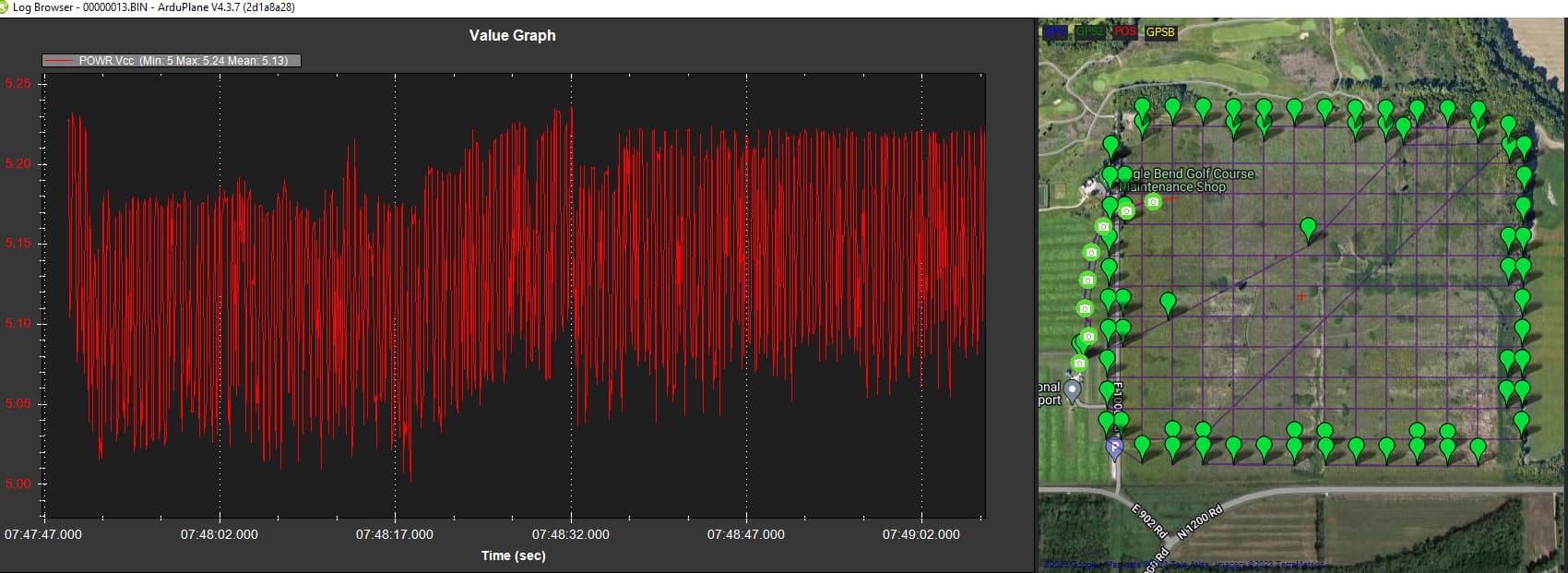
7/7/2023 9:23:52 PM : PreArm: Board (4.0v) out of range 4.3-5.8v
7/7/2023 9:23:52 PM : PreArm: Hardware safety switch
7/7/2023 9:23:21 PM : PreArm: Hardware safety switch
7/7/2023 9:22:50 PM : PreArm: Board (4.1v) out of range 4.3-5.8v
7/7/2023 9:22:50 PM : PreArm: heater temp low (39.2 < 40)
7/7/2023 9:22:50 PM : PreArm: Hardware safety switch
7/7/2023 9:22:40 PM : EKF2 IMU0 is using GPS
7/7/2023 9:22:40 PM : AHRS: EKF3 active
7/7/2023 9:22:40 PM : EKF3 IMU0 is using GPS
7/7/2023 9:22:40 PM : EKF3 IMU0 origin set
7/7/2023 9:22:40 PM : EKF2 IMU0 origin set
7/7/2023 9:22:19 PM : PreArm: Board (3.9v) out of range 4.3-5.8v
7/7/2023 9:22:19 PM : PreArm: AHRS: not using configured AHRS type
7/7/2023 9:22:19 PM : PreArm: heater temp low (36.3 < 40)
7/7/2023 9:22:19 PM : PreArm: Hardware safety switch
7/7/2023 9:21:48 PM : PreArm: Board (4.0v) out of range 4.3-5.8v
7/7/2023 9:21:48 PM : PreArm: AHRS: not using configured AHRS type
7/7/2023 9:21:48 PM : PreArm: heater temp low (33.2 < 40)
7/7/2023 9:21:48 PM : PreArm: Hardware safety switch
7/7/2023 9:21:17 PM : PreArm: Board (4.2v) out of range 4.3-5.8v
7/7/2023 9:21:17 PM : PreArm: AHRS: not using configured AHRS type
7/7/2023 9:21:17 PM : PreArm: heater temp low (29.8 < 40)
7/7/2023 9:21:17 PM : PreArm: Hardware safety switch
7/7/2023 9:21:07 PM : IMU0: fast sampling enabled 2.0kHz
7/7/2023 9:21:07 PM : RCOut: PWM:1-14
7/7/2023 9:21:07 PM : CubeOrangePlus 00370024 34315117 30343637
7/7/2023 9:21:07 PM : ChibiOS: a97ccb41
7/7/2023 9:21:07 PM : ArduPlane V4.3.7 (2d1a8a28)
7/7/2023 9:21:07 PM : IMU0: fast sampling enabled 2.0kHz
7/7/2023 9:21:07 PM : RCOut: PWM:1-14
7/7/2023 9:21:07 PM : CubeOrangePlus 00370024 34315117 30343637
7/7/2023 9:21:07 PM : ChibiOS: a97ccb41
7/7/2023 9:21:07 PM : ArduPlane V4.3.7 (2d1a8a28)
7/7/2023 9:21:06 PM : IMU0: fast sampling enabled 2.0kHz
7/7/2023 9:21:06 PM : RCOut: PWM:1-14
7/7/2023 9:21:06 PM : CubeOrangePlus 00370024 34315117 30343637
7/7/2023 9:21:06 PM : ChibiOS: a97ccb41
7/7/2023 9:21:06 PM : ArduPlane V4.3.7 (2d1a8a28)
SOLVED: This particular airframe has had a weakness in its design. On the right hand side, inside the carbon fiber tube, there is a male/female barrel type connector that connects the elevator servo to the fuselage. I know the design has been improved but apparently it still has problems. If the tail section is not precisely joined and screwed in just right a very small gap is made. When the bird spools up (all four motors) the amount of vibration increases significantly. The making and breaking of connection that this vibration induces causes the signal wire to receive a voltage which is then interpreted by the servo as a move command. The fix is to test the connection by trying to induce (by hand) servo movement.
This one was tough to figure out.