Apologies, I do know that I think I just selected the wrong file by mistake whilst in a rush!
1st you should be running the Bdshot version of firmware for the Matek H743 and configure to use it. Then configure Dshot600, it’s more reliable than 300. Set the Log bitmask back to default as you are not logging RCout. And then make a hover flight in AltHold so MOT_THST_HOVER can be learned and some good data can be logged to set the Notch Filter. Bouncing around in Acro isn’t getting you anywhere.
Hopefully this is more usable?
Yes, much more useful. You have a very high thrust/weight Octo there. I still think you should be running the Bdshot version of firmware as it will be a better motor rpm reference for the Notch filter but in any case this is the FFT response:
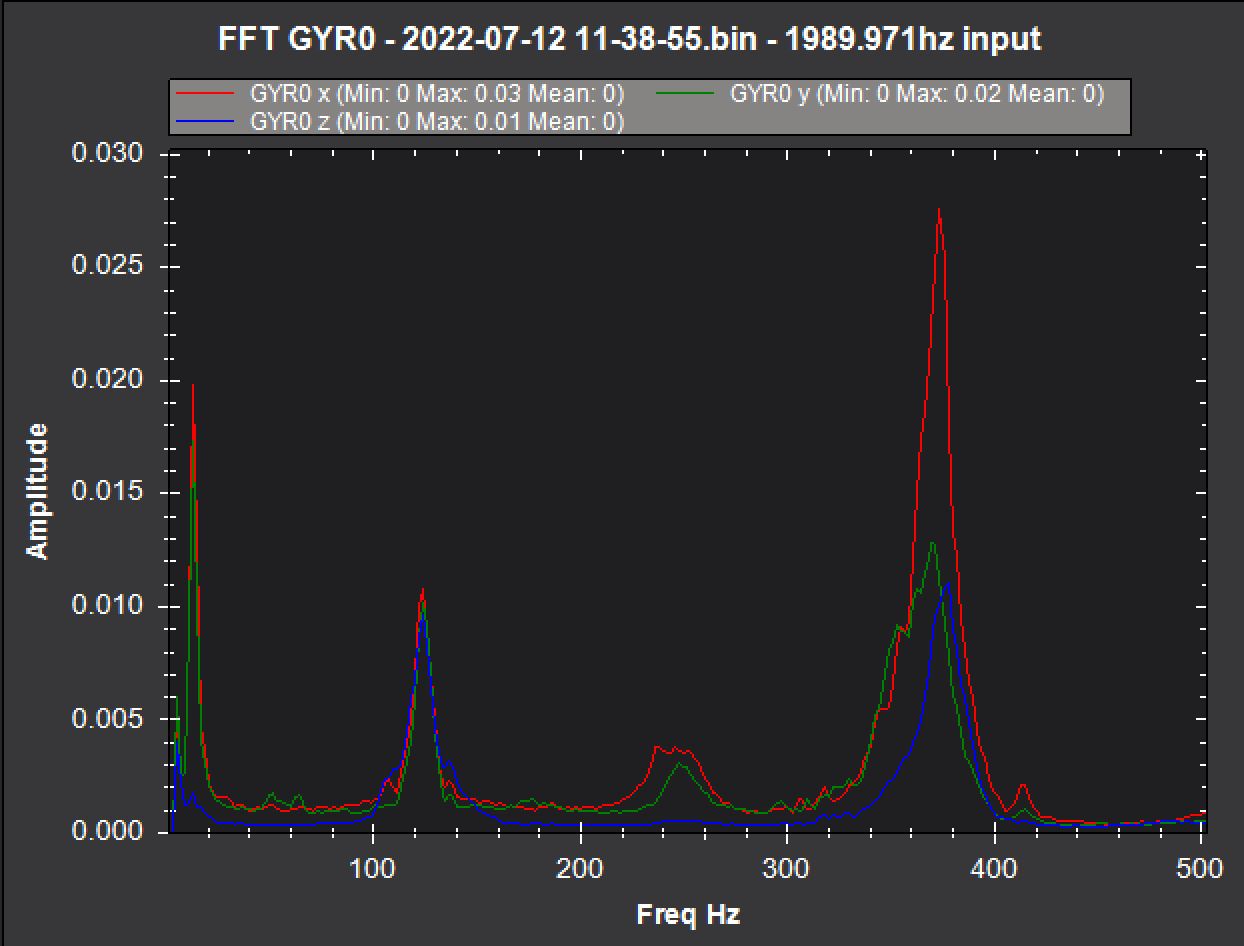
And these are the Notch Filter setting you should use:
INS_HNTCH_ATT,40
INS_HNTCH_BW,62
INS_HNTCH_FREQ,124
INS_HNTCH_HMNCS,7
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,2
INS_HNTCH_REF,1
Then set INS_LOG_BAT_OPT to 2 and make another AltHold Hover flight to determine if the Notch filter is effective. Perhaps a bit longer fligh6t because MOT_THST_HOVER was not learned in this one.
Before making that Flight I would set these also:
INS_ACCEL_FILTER,10
PSC_ACCZ_I,.220
PSC_ACCZ_P,0.110
In general tuning is surprisingly good for default PID’s.
Awesome stuff, thankyou! Initially I tried tuning out the 367Hz vibration. I’m assuming this was a mistake?
And I’m running apd 120a ESC’s which to my knowledge don’t have bdshot available as they aren’t blheli ESC’s but I’m prepared to be corrected!
Also out if interest what made you settle on 7 harmonics?
Some of the APD ESCs do support RPM telemetry I believe, I’m not sure which ones
Those APD ESCs should handle DSHOT and output telemetry with no problems.
Yes, targeting the 1st harmonic (~62Hz) will pick up the 2nd and 3rd. This answers your question about INS_HNTCH_HMNCS, 7 also. It’s a bit mask selecting for the 1st, 2nd and 3rd harmonic.
Ah OK this could be the case. @xfacta and @andyp1per can provide more info about this but they are definitely providing ESC RPM telemetry as you have it configured so I would say you are good if Bdshot isn’t supported.
There is Beta firmware available for the F Series ESCs which adds RPM filtering (Bi-directional DShot).
All the ESCs support standard DShot telemetry (which has an RPM field) by default, no firmware change required.
1 Like
So I tried implementing these changes but when I plugged the system up it gave me an error message down my goggles reading “TOO MANY NOTCHES”. I reduced the notches to 2 harmonics instead of 3 but as i took off the oscillation was very severe and I was unable to fly long enough to log anything worth while. I’m assuming this is because without all 3 harmonics the filtering cannot take place properly. Any advice on this?
Post a link to the .bin log of the flight.
I don’t have access to this until tomorrow. Have you seen this happen before?
Set is back to 3 and set INS_HNTCH_OPT to 0 and see if you get the error.
Or as this is a Commercial endeavor look here:
Commercial Support
Thanks Dave! Yes switching the dynamic filtering off seems to have resolved that problem. I had to redo the PIDs abit to get rid of some newly introduced oscillation but I think its heading in the right direction. there’s still some high frequency oscillation on take off but it looks quite good in the air. I think I’m still getting some noise coming through looking at the fft graph. I’ll attach the logs again.
And thanks for that link. I have reached out to a couple of those companies now; just waiting for a response. in the meantime I’ll keep plugging away to see if we can get it sorted.
This is looking good. The Notch Filter is performing very well. It doesn’t get much better than this:
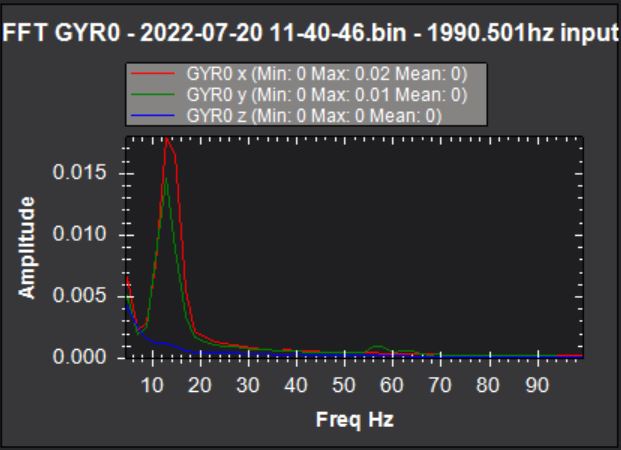
Tuning is not bad either but yes it could be improved. Nice work so far!
In alt hold it seems better but in acro I still get severe oscillations out of nowhere after any kind of quick pivot. I’m also struggling to increase my pids high enough to be effective without causing more oscillations! what would you recommend as my next steps?
I don’t have much experience tuning for Acro flight. This link is about smaller quads but the general tuning process Andy outlines can be relevant.