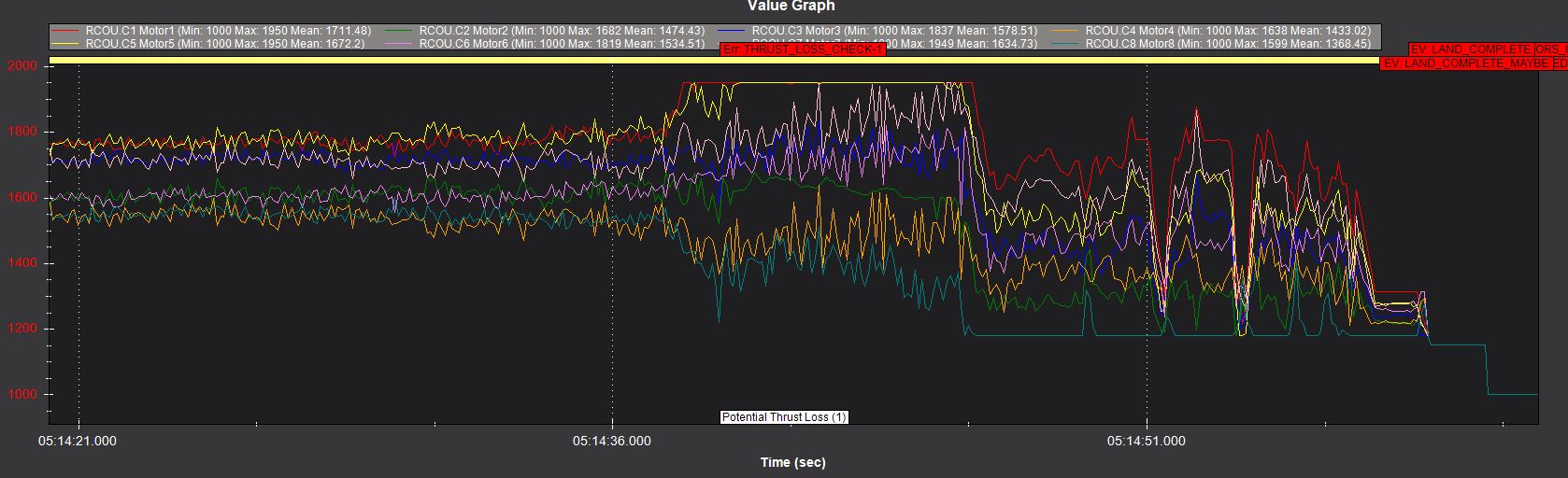
The craft looks overloaded with an average motor ouput of ~1700us at hover. Also, there is a mechanical yaw bias with the CCW motors commanded higher than the CW motors indicative of twisted arms, motor mounts or frame distortion:
@PVR2022 , You are very lucky. Not all engines burned. In fact, all the engines should have burned. Even if they are not burned, they may be damaged. Your motor, propeller and battery combination is completely wrong.
.
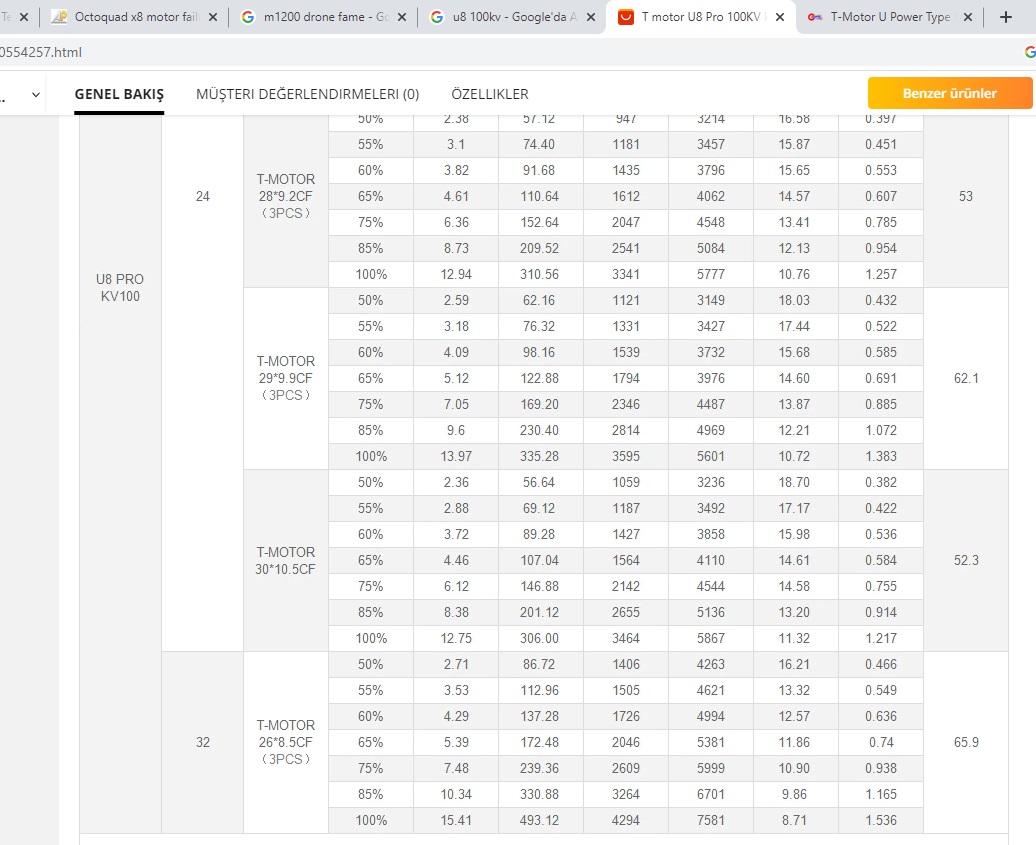
32 inch propeller is too big for 12S battery. Examine the table carefully.
.
Octocopter Payload is not 20kg, Total weight is 20kg. Recommended.
Your motor burned out because it was pulling too much current. Where did you get the 32" prop idea from? Was it thinking that the bigger the prop the more it will lift? To ensure you dont burn out any motors make sure your battery motor prop combination doesn’t result in exceeding the max rated power of the motor at 2000us. Or if it does you need to limit the pwm command in the flight controller untill you are below the max power of the motor then don’t expect that you’ll get the thrust ratings specified in the data sheet.
-yes, 20kg payload are too payload for this frame. Nevertheless, the frame its ok and we have made some static test with these loads without any damage or deformation.
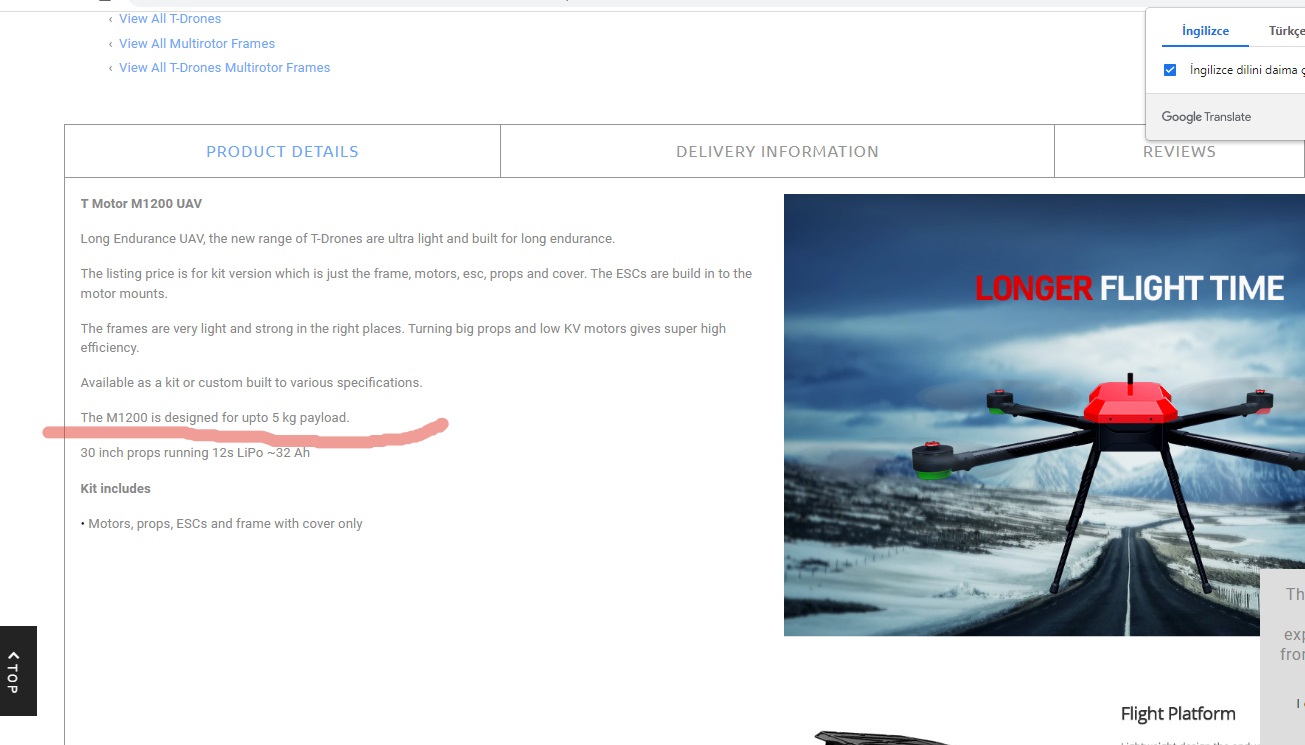
-32 inch prop its the stock prop in the m1200 drone with these motor u8 xl 100kv. we made a special version of the m1200 with u8 100kv coaxial arms to make a m1200 octoquad version.
-12s battery (4x 22ah solid state li ion) 2 series 2 parallel. its the standard power battery setup for the m1200 quad with 32in.
without 20kg payload, the drone flies very good with a lot of flight time and good performances.
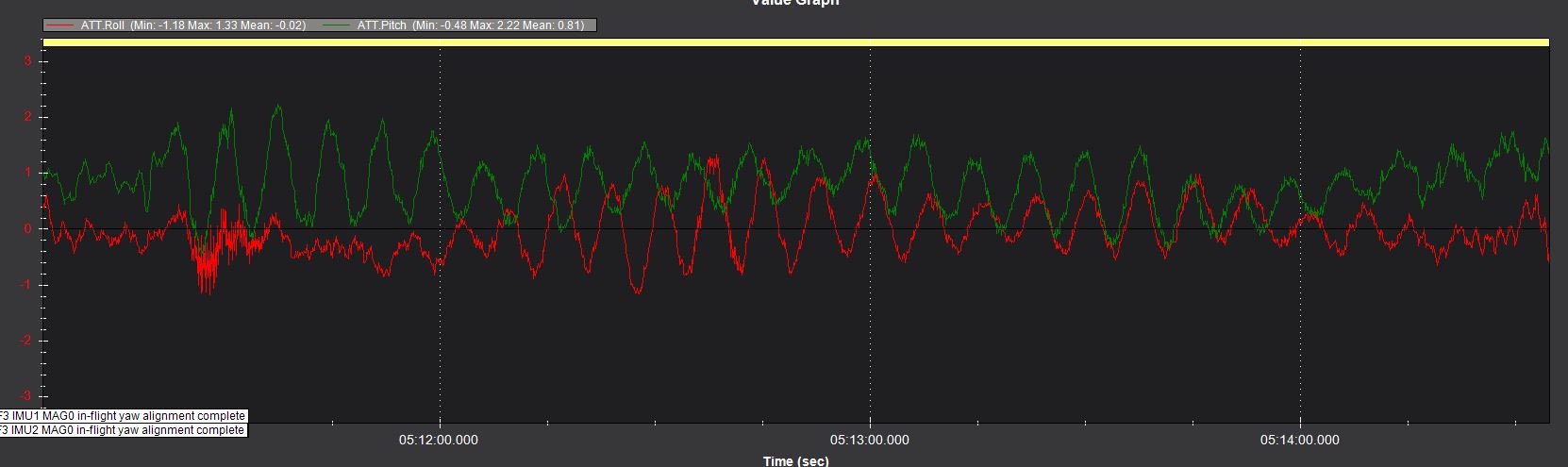
these oscillations can be origin in the payload system. the 20kg load, are suspended by a 10m rope and can made some pendulus oscilations.
and the final question:
what will be the safe hardware setup to make and octoquad capable to lift 20kg with 1500 ms pwm hover?
the mn1010 kv135 12s with the same props, 32x11 will be a safer option?
8x motors coaxial to make a octoquad.
dont worry about the frame, in these case, we build an special version reinforced custom frame.
@dkemxr As noted, the frame is stretched. One day it may disintegrate in the air. Due to invisible capillary, stress cracks that will form over time.
.
Frame Problem, Problem
In my opinion that payload would require a redesign of the frame - starting over.
I would use different ESCs too - the ones you have can be prone to desync and not recover.
Bigger props are not necessarily better, unless you can pair them with a bigger motor. The weight quickly increases…
Plenty of people probably use the U8 motors, I’ve seen some reports the same as yours (burnt out motors, dead or dying ESCs) even without such a big payload.
Throwing a few things into ecalc, and keeping the quadX8 format, you need the U11II-120 and 28inch props, or the 13II-130 and 26inch props. I’m not advocating that it would work with your frame though… You’d need to spend a few hours in ecalc for this sort of payload.
And again - get some real ESCs
Does not carry, does not carry, does not carry. It does not carry under load at all. With a 12S battery, it does not carry at all.
.
Consider what Mr. @xfacta wrote.
27-28" is whats on the motor spec sheet for 100kv u8. And a 25% derating for coaxial so no more than 18-24kg max take off weight for an octo coax. If you want it to hover at half power then you probably need a system that is rated for a mtow of double your total copter+payload weight, maybe what 60kg?
Hello,I’m from T-DRONES team. The motors and props you came with are not suitable for the M1200,please contact me if you need more T-DRONES products.
email: sales02@t-drones.com
Whatsapp: +86 19379174401