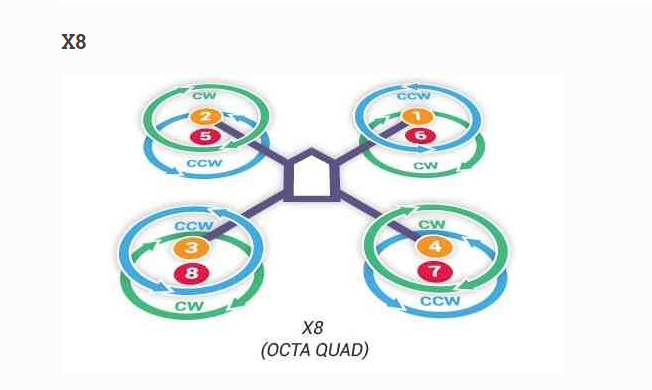
I am in the process of creating an Octoquad that uses coaxial rotating motors on an H frame and had a question about the order of the motors. I haven’t seen much online about making an H8, but in the Arducopter documentation it outlines how to set up an X8. Is the order of the motors (1-8) on an H8 going to be the same as on an X8 with just the direction of the motors flipped?
Octoquad H8 Frame Configuration in Mission Planner:
I haven’t done it myself, but yes, it should just be the opposite of X8.
On coaxial copters, the bottom motors always counter-rotate the top motor on the same arm, so maybe a better way to think about it is the top motors will be the normal H motor order, with bottom motors opposite.
Theoritically , if your H frame was perfectly rigid with no torsion, it would be the same as an X8 configuration. Practically H frames are never rigid and produce some torsion which contradicts yaw movement, which is why the H (4motors) motor config differs from the X frame (to cancel the counter yaw movement effect due to the torsion).
I have no idea what you should select for an H8 frame. Ardupilot does not have such frame configuration.
If I were you, I would try an X8 configuration and would reinforce the frame to avoid any flex/torsion as much as possible. Or you change your frame and go with an X8 which is very very good.
The H frame provides more surface area in the center section of the drone, allowing for us to fit more components on the drone while minimizing frame weight. There’s a lot of other small reasons why we chose the H frame over the X.
Ok thank you for the info, if you look at the first picture that I posted, “Octoquad H8 Frame Configuration in Mission Planner”, It specifies that we can select an H type frame while running as an OctaQuad. My thoughts are that Arducopter does support an H8 because of the above selected options. I can be wrong, but we will be testing both the X8 and H8 option on one of our smaller drones.
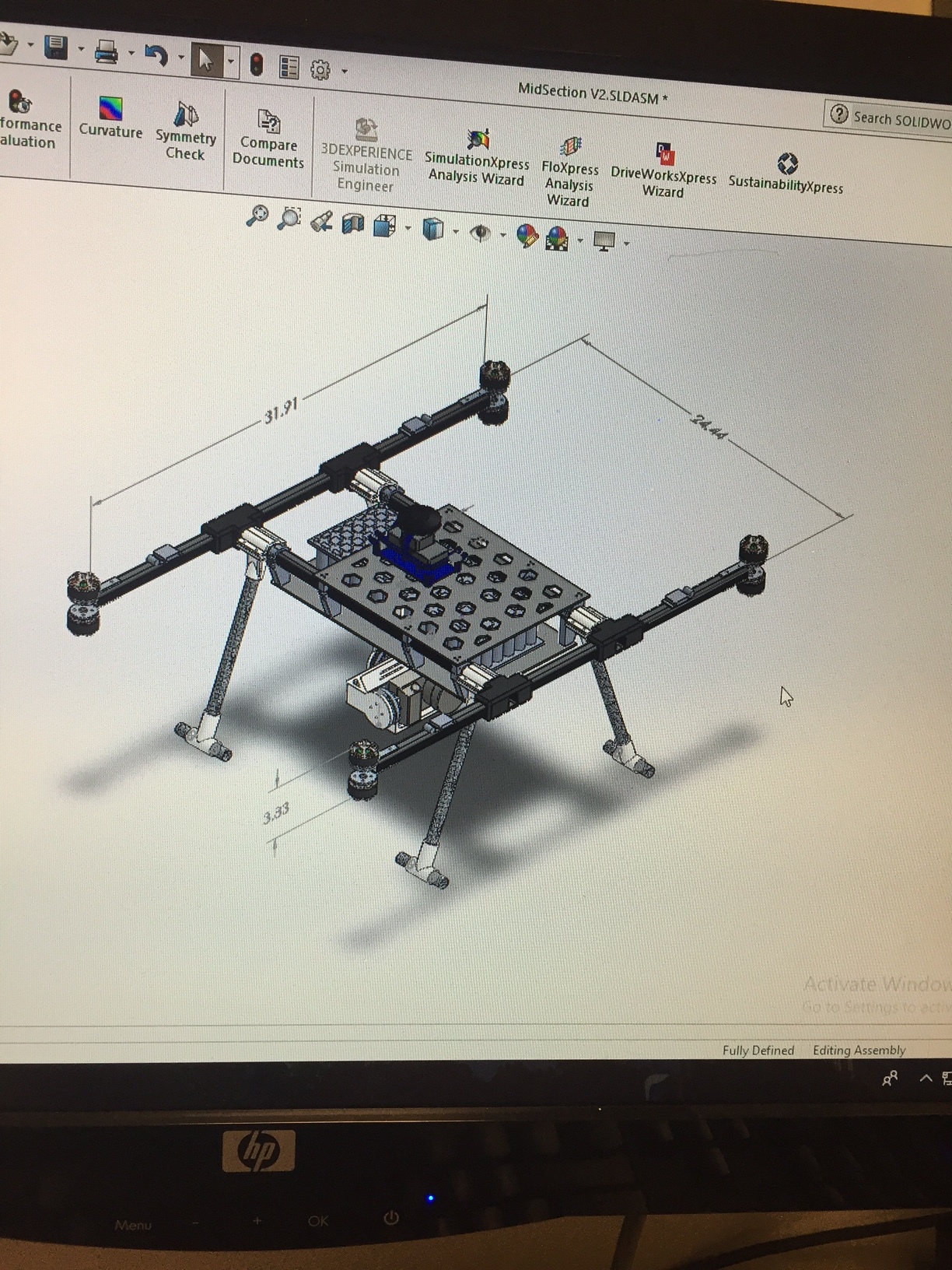
To give some context, I’m part of a team at a college that creates autonomous UAV’s. This is our working design:
This frame should easily be able to take any torsion from selecting the X8 configuration, but our prototype drone might not be able to. (Excuse our terrible wiring)
Cool! Looking forward to see how you progress.
My comment wasn’t aimed at your design, just that the X8 setup should work fine for a coax H. 100% fine. There are no torsional issues, as each motor pair is balanced.
Torsion is about frame torsion (the central beam, longitudinally), which creates a yaw counter effect to the wished Yaw, even on a quad (nothing to do with 4 or 8 motors).
Since H8 exists in mission planner, that is the choice to select instead of X8 (if your frame is a H obviously)
I am a bit desperate and i realise there has been no activity for year or so…
also I am not sure if this is the right place to make this post.
so, I am making a H8 … in the works … but I do not see the H8 frame in the Mission Planner.
Everything is updated …normally … Help?!!