I was able to get my first semi-successful flight in that the bird did take off but immediately started to drift as I compensated it started to drop i.e. loose altitude so it was a bit difficult to control due to my lack of pro skills. I keep reading all of this information about tuning but really have no idea on how to start and how tuning works. I am so busy controlling it I’m not sure how I could manage to tune it at the same time.I am using Pixhawk Cube with latest stable firmware and Here GPS unit, Tarannis radio and Misson planner telemetry. Thanks for any help in advance.
If you were able to take off then it must be flyable.
I am assuming you were in Stabilise.
Then try Altitude Hold which should take care of the altitude variation.
If all goes well then you can advance to Loiter, but make sure the copter is happy with the GPS first, it might take a few minutes.
And one you are in Loiter then you setup a switch to do your Autotune.
And that is about it.
It’s all documented quite well in Wiki.
If you’re having trouble and you’re not sure what it is post a log file from the Pixhawk.
Ok, hopefully I will able to re-test next week after I get it put back together.
I gave it another try today switching from stablize to AltHold in flight which did contribute to a more stable altitude but it did not hold very well. It appears that the speed of the motors does not compensate for movement in direction to hold altitude. When I move forward etc. turn etc. the bird will descend or loose altitude. Stop and it ascend instead of staying stable. Here are the results of the Auto Analysis…
Log File C:\Users\LeeTaylor\AppData\Local\Temp\tmp846A.tmp.log
Size (kb) 22417.4287109375
No of lines 271375
Duration 0:21:13
Vehicletype ArduCopter
Firmware Version V3.5-dev
Firmware Hash 8c64728f
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - [?] Autotune 180430-209897
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (94.08%)
Max mag field length (665.83) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.54, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [178, 176, 172, 170, 172, 170, 177, 177]
Average motor output = 174
Difference between min and max motor averages = 8
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = FAIL - 72 slow loop lines found, max 11.22% on line 72697
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -
Link to Dataflash Log: https://taylorcomputing-my.sharepoint.com/:u:/p/ltaylor/EZ4t0_3-dM5MhTpFqlrw2JUBmgBEElvYF7P8rFJqrv1qCQ?e=CBFeiS
I tried yet again today using flight mode PosHold and it still drifts away and will not hold position. Any more ideas?
I see a number of issues in your log.
Vibration would be the first thing to address.
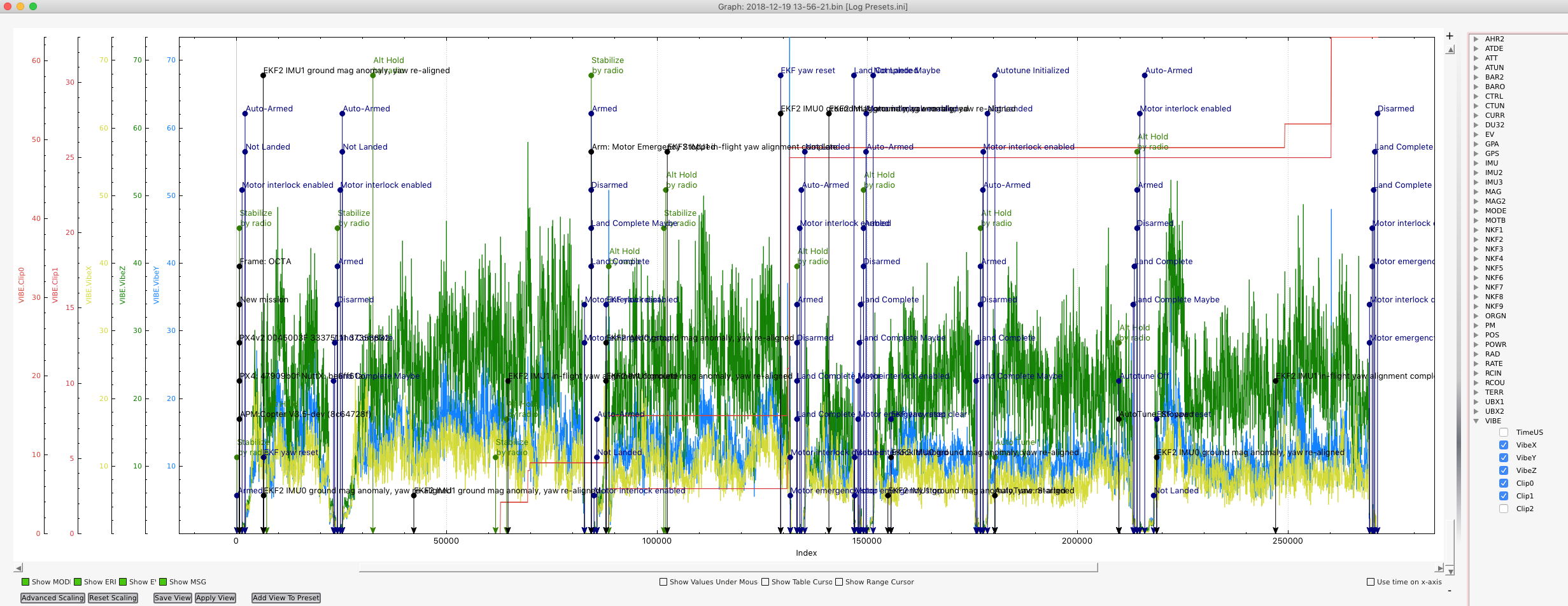
I looked firstly at the IMU values, and although a bit noisy did not seem to be overly bad, but looking at the VIBES shows clipping occurring. You need to address the vibration before anything else.
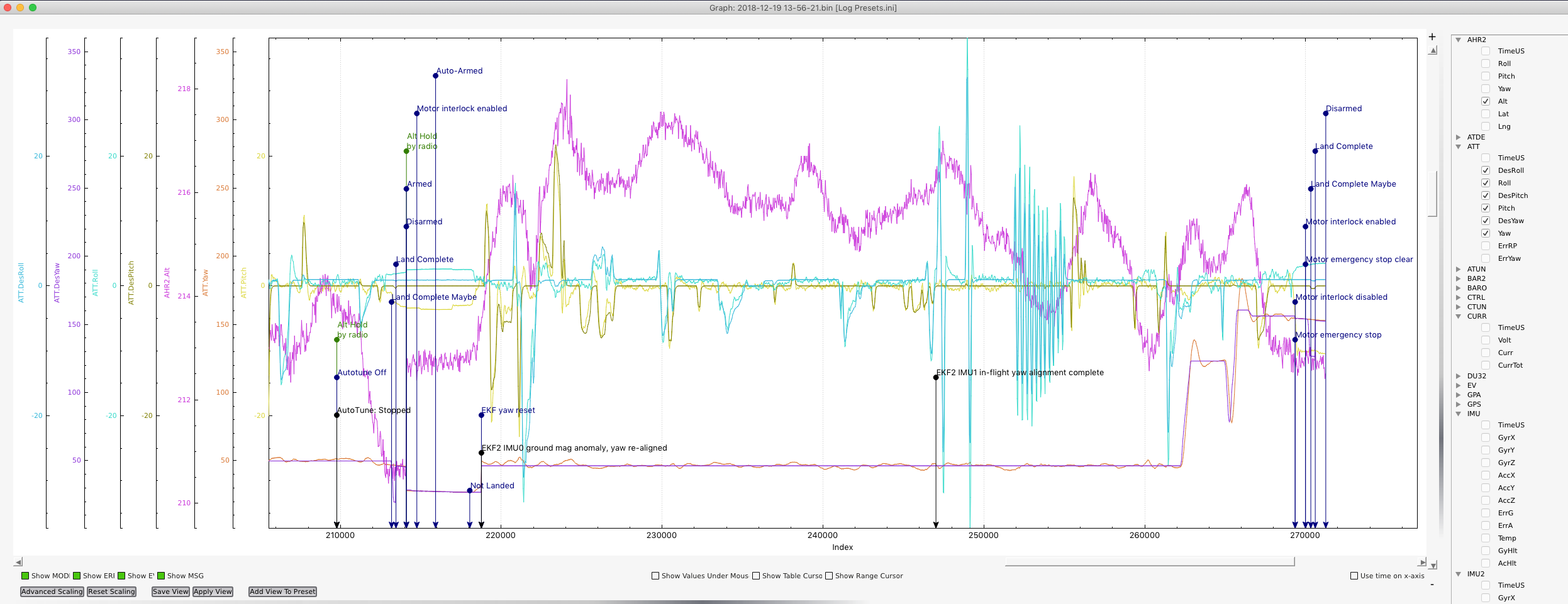
Desired v Actual in Roll/Pitch/Yaw showed the usual twitchy reactions from an untuned copter.
This also highlighted the ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT values at the default 20.
You should lower those values as described here.
I am assuming you have props over 13"
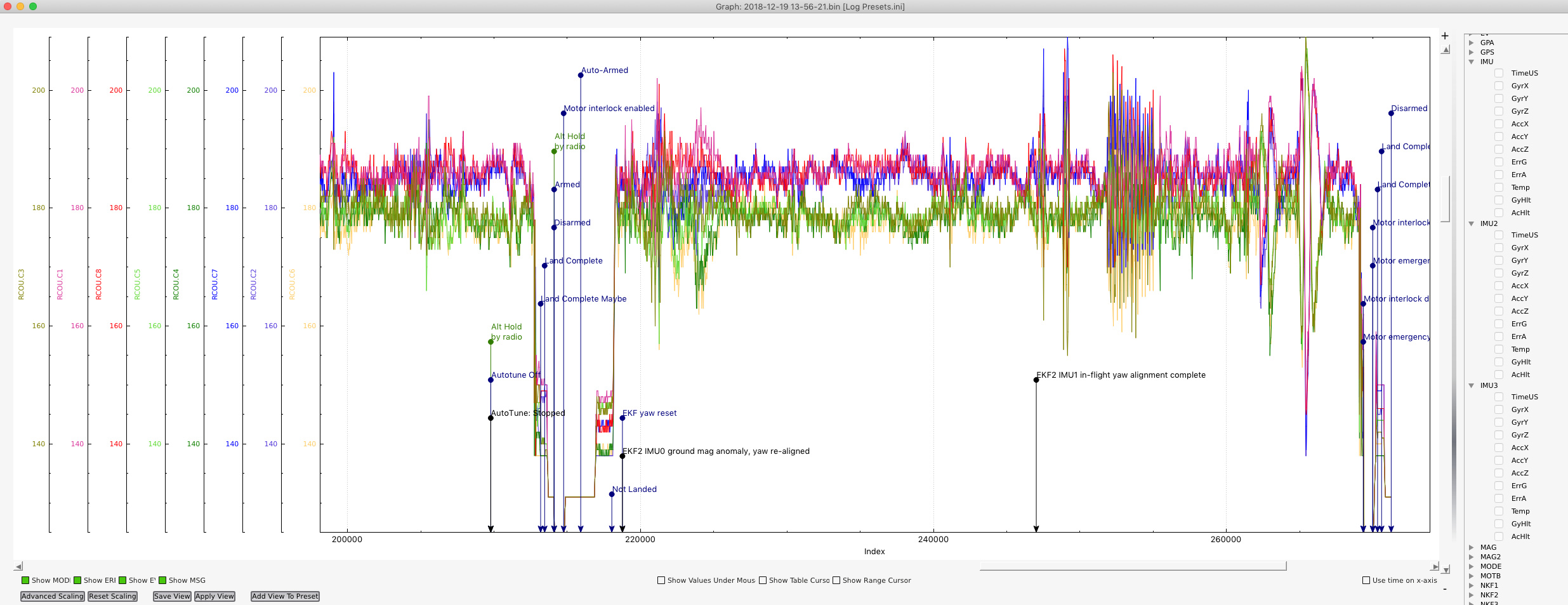
It was the RCout that gave real indications of problems.
Your RCout can be considered close to maximum at 1800, leaving virtually nothing for stability or altitude corrections, as you are observing. The props are working so hard they are showing design flaws in that the CW props are not performing as well as the CCW props.
So check for vibrations, improve vibration dampening.
Adjust your filter values in accordance wit the WIKI.
Lighten the copter or improve power.
Thank you so much for taking the time to look into this. I will remount the autopilot, I think the foam that I am using is too stiff and hence not providing adequate dampening. I am quite concerned about the weight issue as I have not even mounted a camera or gimbal yet. I am using 8 400kv motors with 1555 props which are supposed to produce 2780g of pull a piece using a 6s battery 10,000mah. The frame it the tarrot 8x000 umbrella, and the motor size 4114 is recommended, perhaps I should consider different motors. I’ll check back in after I get it re-assembled.
So the issue with the CW vs CCW is that more ESC related, non-quality motors, or vibration? The props all all the same mfg size etc.
At 50% throttle the 400kv motors on 15x5 props will only produce about 1kg of thrust.
Whats your TOW?
Are all the motors level?
Is there any rotational flex on any motors?
Not all props are created equal.
Manufacturer?
CF or plastic?
There is definitely a CW force that is having to be countered in flight.
Ok, according to my calculations TOW ~5810g
I have 1 motor max at 2780g so 28% (50% throttle) should roughly be 778g * 8 = 6227, so I should have room to move…
Motors are level, props are the polymer tarrot 15x5 recommended by mfg. No rotational flex. 30A BLHeli-S ESC using OneShot (I think)
I was able to get the octo back in the air today and it worked very well, I was able to make it from stabilize, to Alt hold to Loiter, and then to AutoTune. During the AuoTune process one of the motors went out, I’m sure it was the ESC but have not verified it yet. Even with the motor out I was able to control it and land it. 