Vehicle: octo running arducopter latest build 3.5.3. frame 910mm 6kg without payload.
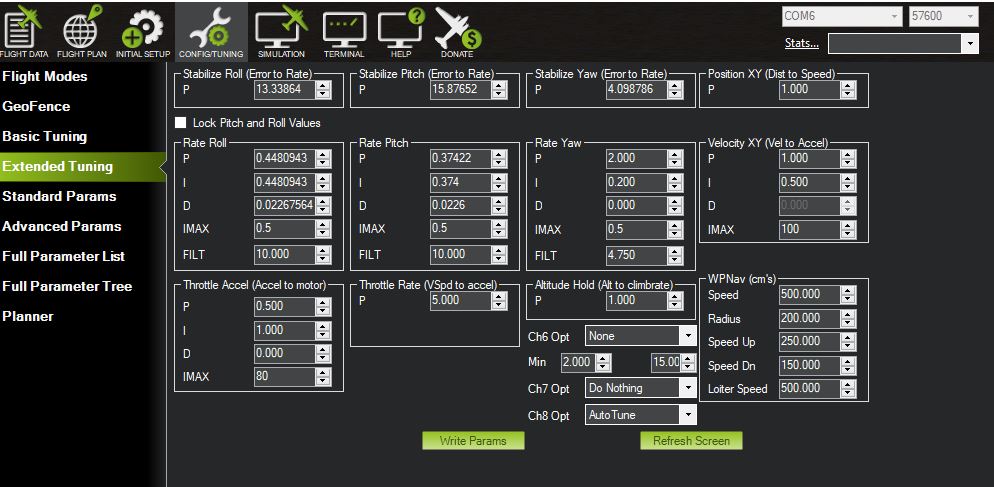
I’ve just swapped over to a Pixhawk 2 FC and i’ve noticed a strange behavior with Yaw before and after tuning and auto tuning. The copter keeps spinning after yaw command by about 80% of the initial, so say if I input yaw till the copter completes a full 360 degrees stop input, the copter won’t stop yawing until another 270 degrees. i’ve adjusted PID’s and ran several autotunes but no real change. incresing the I value to 1/10th of P and beyond yealds no discernible change. I’ve attached a snapshot of my current PID’s above. Which seen a little weird but may be normal on this size. Would love to hear some opinions as I’m lost where to go.
Had the same issue at first when updating to PH2.1
Found it was a combination of compass calibration and Yaw auto tune that finally sorted it out.
Cheers. I’ll give that compass a calibration after the storm passes.