Hello all:
I am building an 8 propeller VTOL aircraft (configuration in the figure below). I am using an Orange Cube FC (Quadplane mode, ArduPlane 4.2.3) and powering the system with 2 packs of 6S batteries. It has a wingspan of 1.8 m and weighs around 7 kg. All front propellers tilt forward for fixed wing flight.
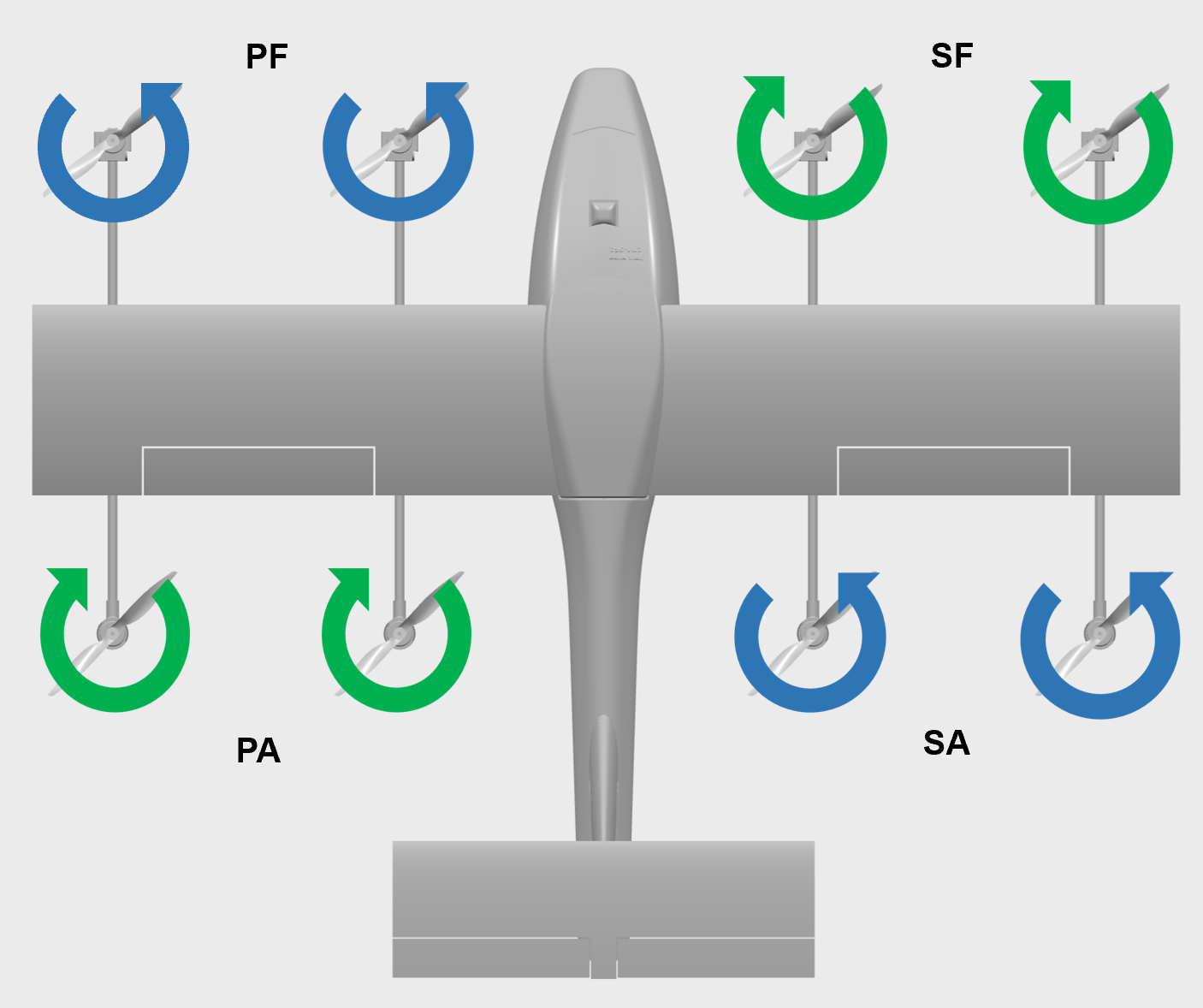
There is no exact match to this frame in the ArduCopter website (Connect ESCs and Motors — Copter documentation). My current idea is to use a quad-H configuration and duplicate the signal wires for the outboard propellers ESCs. Effectively, this would mean that propellers would be controlled in pairs (see below).

I had a conversation with Ben from 3DXR (who has been very helpful), where he suggested I post the question on the forum. Can anyone think of a better way to get this done? For example, the Octo-H configuration looks somewhat similar to ours, there may be a way to match both concepts by tweaking certain parameters.
Any help would be greatly appreciated.
Thanks in advance. ![]()