Hi,
I have built two OctaQuad (Co-axial quad) drones with one 18 inch props and another with 22 inch props. The frame design is “H” frame. The firmware is same in both the drones being Arducopter 4.1.5 with frame class OctoQuad and frame type as “H”. I am using CubeOrange with Kore carrier board and all the parameters of Kore carrier board are checked according to the docs.
With 18 inch props, it is flying smoothly but when the same firmware is installed with 22inch props the whole frame is vibrating, more like fluttering of arms. But if the props are changed to 18 inches there is absolutely no fluttering of arms. Another problem is that when frame type “X” is selected, without changing the configuration of motors as front right motor on top is in clockwise direction, then there is no fluttering of arms and no vibrations whatsoever. If the motor configuration is changed according to “X” frame type which is forward top motor is counter-clockwise direction then there is again fluttering and vibrations and if with same motor configuration “H” frame type is selected then there is again fluttering.
The first drone has been performing well with 18 inches prop with “H” frame type and motor configuration done according to “H” type.
According to the wiki the only difference given between the “X” and “H” in OctoQuad is in motor rotation. I have tried reinforcing the frame structure but it is still behaving similar as before. As frame is capable of handling 4 times the load it is intended to maintain.
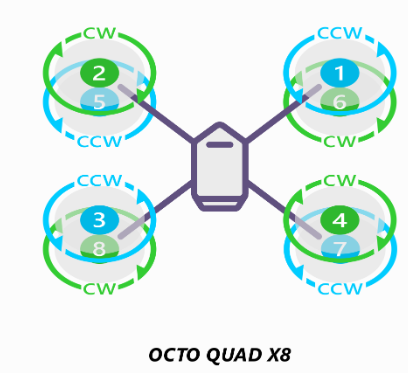
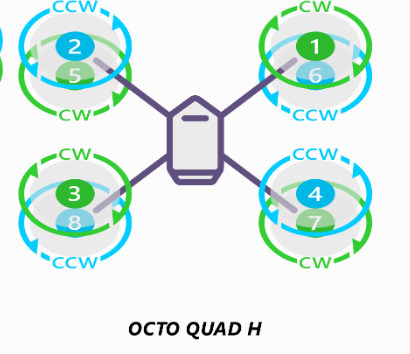
Below are the pictures for motor configuration in “X8” and “H”:
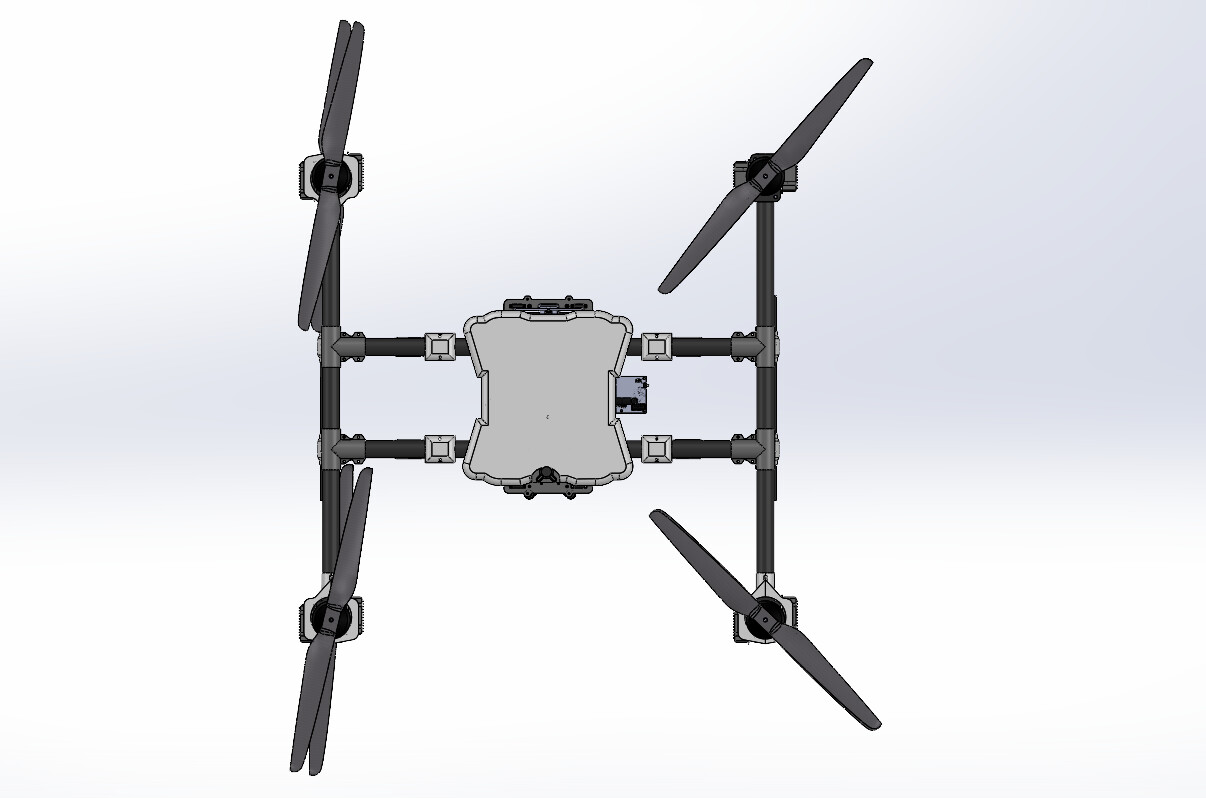
Here is the frame:
Below is the log file attached which includes both frame type “X” and “H” being selected from frame type selection in Mission Planner. It is configured according to motor spinning direction from “X8” frame type and first given throttle with “H” frame type selected and again armed with “X” type selected:
2022-04-11 17-04-00.bin (909 KB)
What could be the possible reason for the the fluttering when configured with the relating frame class and frame type when used with props higer than 22 inches and why is it working in cross configuration as in when frame type “H” is selected with “X” type motor rotation and vice versa?