I’m an experienced quad builder, now trying to set up a big octaquad in plus configuration. Something’s probably wrong, but can’t figure out what. I’m testing some first flights hooked to a safety rope, and I see a clear cross talk between roll and pitch: in particular when rolling, I can see a clear response on pitch too, like if this was not setup as a plus but as an X frame.
4.5 firmware, Cube black autopilot. Anyone willing to have a look at the logs/parameters and point out a setup mistake would be greatly appreciated!
Hi Max,
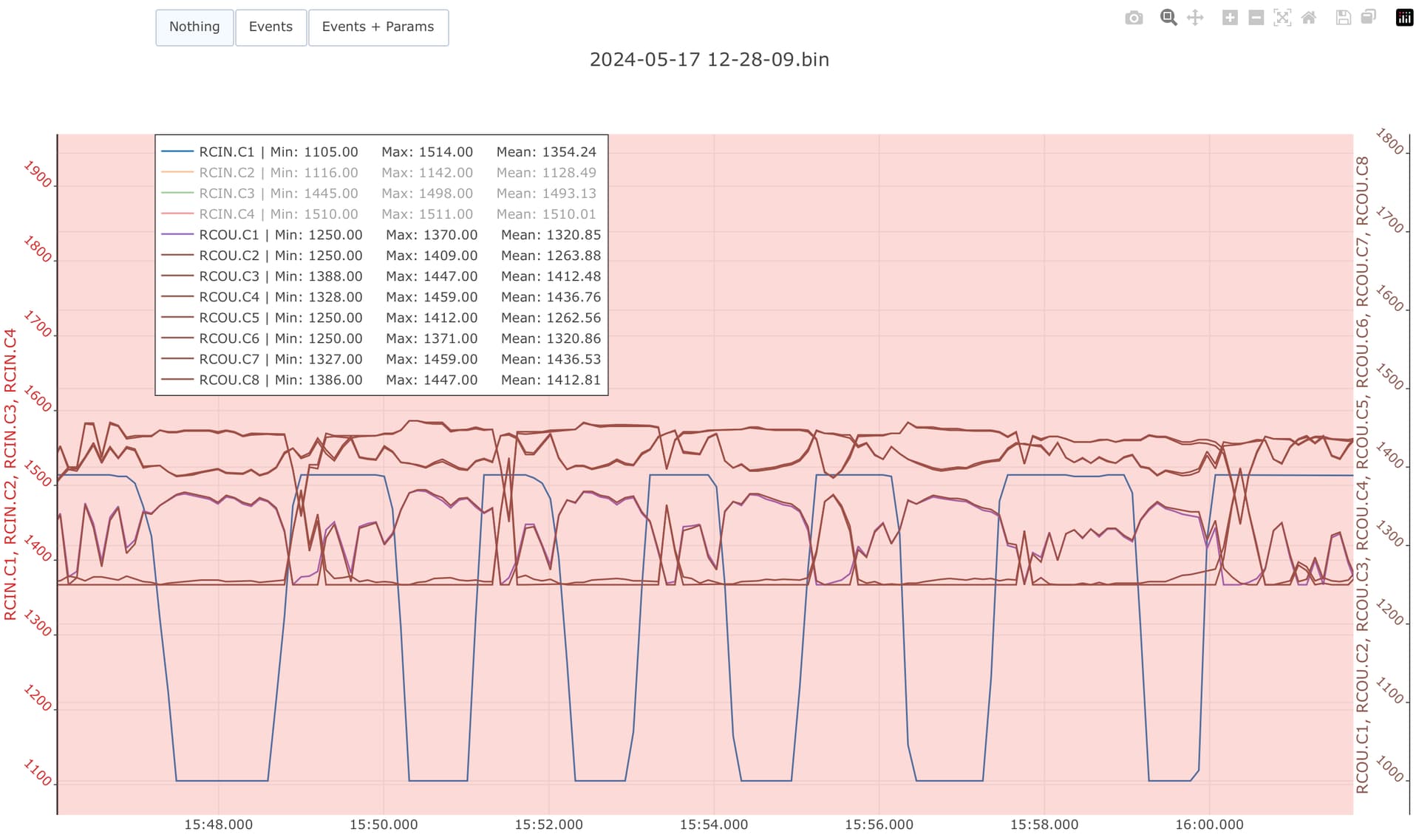
Just looking at the logs it feels that there is some discrepancy in control loops or PIDs. If you look at your desired values and actual values you will see huge difference. What propeller size you are working on because your PIDs are set too high for large octaquad.
Thank you for checking! Actually is a large pro type platform powered by 8 EDF (90mm). I couldn’t do a deep tuning yet, it’s still hooked for safety being the very first trials. It actually stabilizes in a quite acceptable way, but I’m worried to go in free flight to deepen the tuning because I saw this strange cross talk behavior between pitch and roll.
Besides the poor tuning, don’t you see a cross talk between the two axis?
Thank you again
This could just be the slow response to required thrust changes in the EDF’s. There was another example of using these some years ago and it’s best attribute was rapidly discharging the battery.
Can’t really picture this as an Octoquad. Post a photo.
Thank you Dave for your reply and checks! Maybe it’s just as you say: EDF are a challenge. Moreover, the bird is still hooked, and this creates reactions on all axes for sure. I can’t post a photo right now, but you can imagine it as a quad with 2 EDF one aside the other in place of each rotor, so an octaquad is probably the most similar of the standard architectures.
I will now open a new thread since I need to kill the yaw control loop (for the moment I’m controlling the yaw manually with a servo which moves a fin), but I couldn’t find a way for that.
In practical terms probably an insurmountable one for a multirotor. The only one I have seen fly in a video was on the RCG forum and it would be better described as a hovering battery discharger. No attitude control and extremely bad efficiency.
And yes, tethering is never a good idea unless it’s supplying external power but that’s another ballgame.