Hey Ardu team!
My Octaplane observed an uncommanded pitch and eventually lost control. I have been studying the logs but cant seem to find out what went wrong. Hoping some kind souls here would offer some insights into what happened.
Problem:
In the short 30 second flight, the octaplane loses control after transitioning to FWBA. There were some uncommanded pitch, and the octa VTOL motors suddenly spin down[13:17:53] and spin up [13:17:56], and the aircraft literally fell out of the skies.
Setup:
octaplane setup with 2 pusher motors at the rear.
Octa X config; the odd numbered motors are in front and the even numbered motors are at the back.
2 modes - QHOVER and FBWA.
q_assist with the assist speed set to 0.
Observations:
- immediately after switching to FWBA mode, there is quite an error between CTUN.Pitch and CTUN.NavPitch
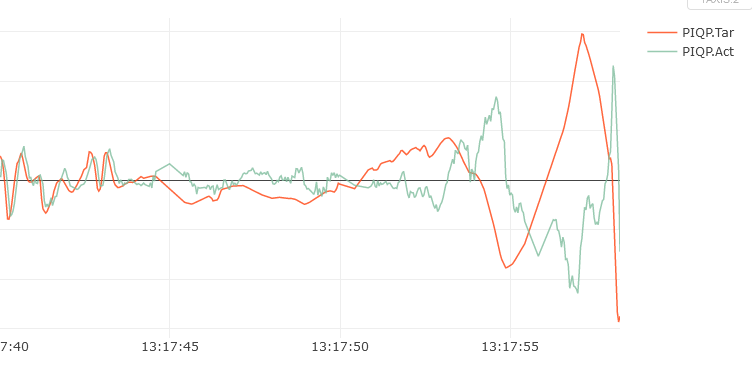
- PIQP.Tar shows the diverging oscillating pitch behaviour. Does this mean that my the autopilot wanted the oscillating pitch? as it is the pitch target of the controller…
- octa VTOL motors suddenly spin down[13:17:53] and spin up [13:17:56]
I have included the log file and a video of the flight below.
Greatly appreciate any input and hope to hear from you folks soon!!
Video: https://www.youtube.com/watch?v=DYjh7BDH7l4
Log file: https://u.pcloud.link/publink/show?code=XZLGnBXZmP1RBSHi6rbro4Dm42Apk86VhRKV