I made the S1000 (DJI) Ocatacopter which has pixhawk cube orange with 4.0.7 firmware. After made this, i tested for the first time , Take of the drone with Alt hold mode after checking the Ailreon and roll direction is right . But as soon as the drone was taken off, it started to spinning constantly and looks like the yaw key doesn’t work. So I checked the motor rotate direction , ESC order but everything isn’t wrong. I calibrated all the ESC at once. And the props are all right direction. I don’t really understand what the problem is…
Same here. Cube Orange, 4.0.7. stable Ardupilot. I checked ESC Calibration, PID of YAW and Compass Value, Trim on RC. They are all looking fine. Getting sam issue, that copter is slightly turning cw.
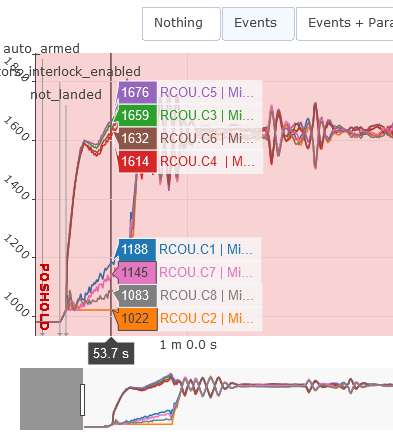
In Log File i find out, that all CCW Motor spinning faster than CW. You can see it from start on.
Is there a difference in the rate at which it yaws depending on if you are going up or down? I saw something like this ones on a very powerful drone which had the MOT_SPIN_MIN set to high.
How is the compass, using only external? When the drone sits on the ground is the heading/compass slowly drifting?
Check your frame, as far as I remember, S1000 has tilted motors and and spins motors opposite to Ardupilot. Which means the motor tilting with ardupilot is wrong and increase yawing.
I am only checked the Trim in RC, but not in Parameter Settings. After new Calibration of Sticks in QGC RC_Trim changed from 1429 to 1491. Now yaw is stable.