Good Afternoon,
I am currently testing the built-in obstacle avoidance features using exclusion fences in ArduCopter 4.0.3 and had some questions regarding the craft’s obstacle avoidance procedures. I am currently running these tests in a simulated environment - so I don’t know if this carries over 100% to real-world flight. Nonetheless, I have the parameters for obstacle avoidance set as follows:
- OA_Type: 2 (Dijkstra)
- AVOID_DIST_MAX: 5 (meters)
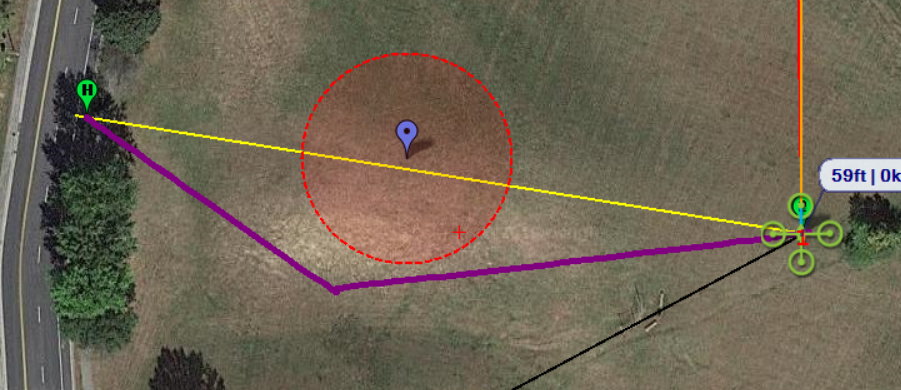
Currently, when I setup a straight line mission with a circular exclusion zone in the middle (picture below), the craft avoids the zone successfully. However, it seems to come to a stop at the mid-way point used during the avoidance maneuver. Is there anyway to have the “spline” through this point without stopping? The additional point was not manually added into the mission - so I do not see a location to change a “delay” (like you would with a regular waypoint).
Thanks!