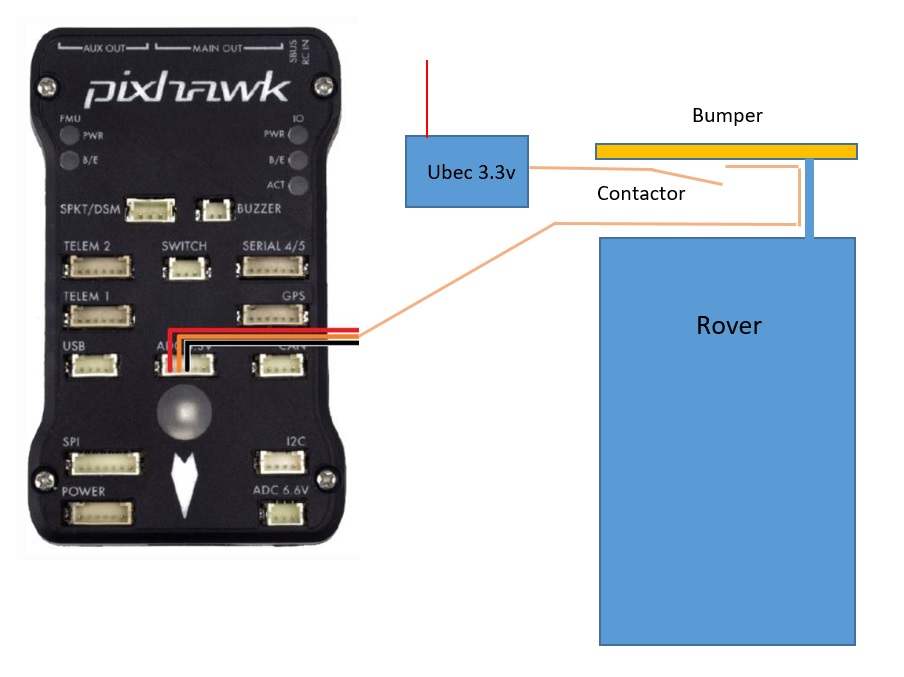
I would like use a bumper like object avoidance on a rover of 50 kg.
Do you think what if I connect contactor on the bumper with an Ubec 3.3 voltage on ADC 3.3 Pixhawk connector like Maxbotic analog sonar, with the same paramters, that will work ?
BTW you have it inverted, close distance/compressed bumper would be low voltage and far distance/uncompressed bumper would be high voltage to be consistent with the maxbotics sensor. Let us know what you found!
Sorry for my late response.
I haven’t tested the system yet, I will be building a new Rover, certainly in August - September and I will test the system then.
I’m finally moving forward on my project.
Rather than using UBECs, I programmed a microcontroller that will drive a PWM to Analog voltage converter to “make the Cube believe” that the information is coming from the sonar.
The idea of using a microcontroller is to be able to add features such as a sensor that will stop the rover in the event of rain, etc.
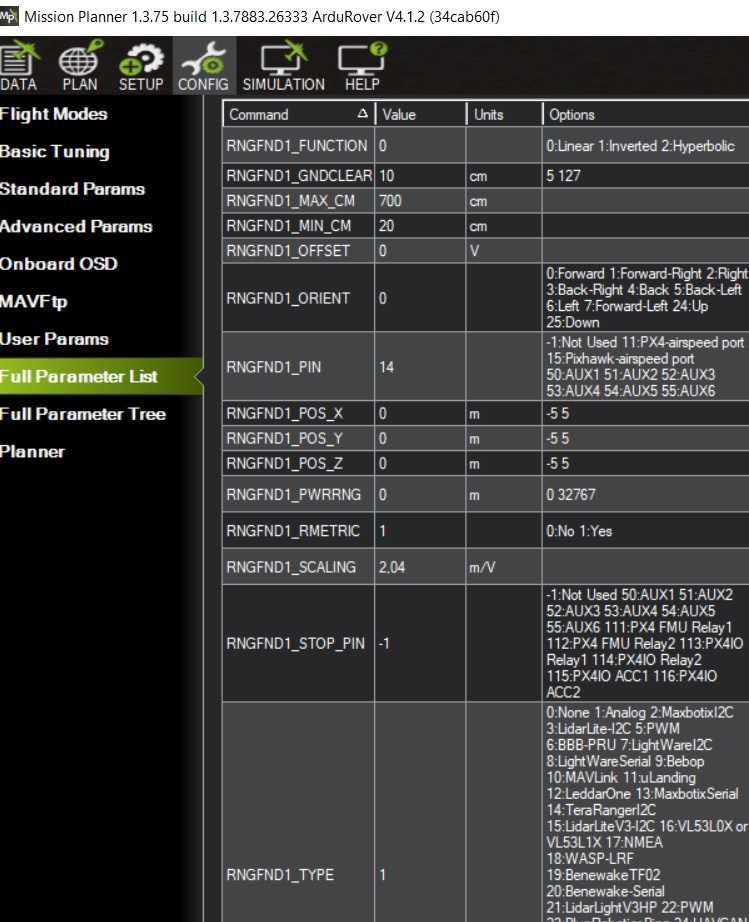
I wanted to configure the analog sonar on my Cube Orange which has rover firmware 4.1.2.
When the analog sonar parameters are not activated, I have 0 on “sonarrange” and 0 on “sonarvoltage”.
However, when I activate the sonar, there are numbers that appear on “sonarrange” and “sonarvoltage” while nothing is connected to the Cube.
I connected my system to the ADC connector of the Cube and varied the voltage between 1 and 3 volts and nothing changes on “sonarrange” and “sonarvoltage”.
you could do this with the Ardupilot button input but rather than use it as proximity you could set it to something like hold or motor interlock if you just want to stop it. https://ardupilot.org/copter/docs/common-buttons.html