Be so kind and can help one from the newbie ardu user how to setup notch filters? I found lots of videos and read ardu wiki but still I am lost.
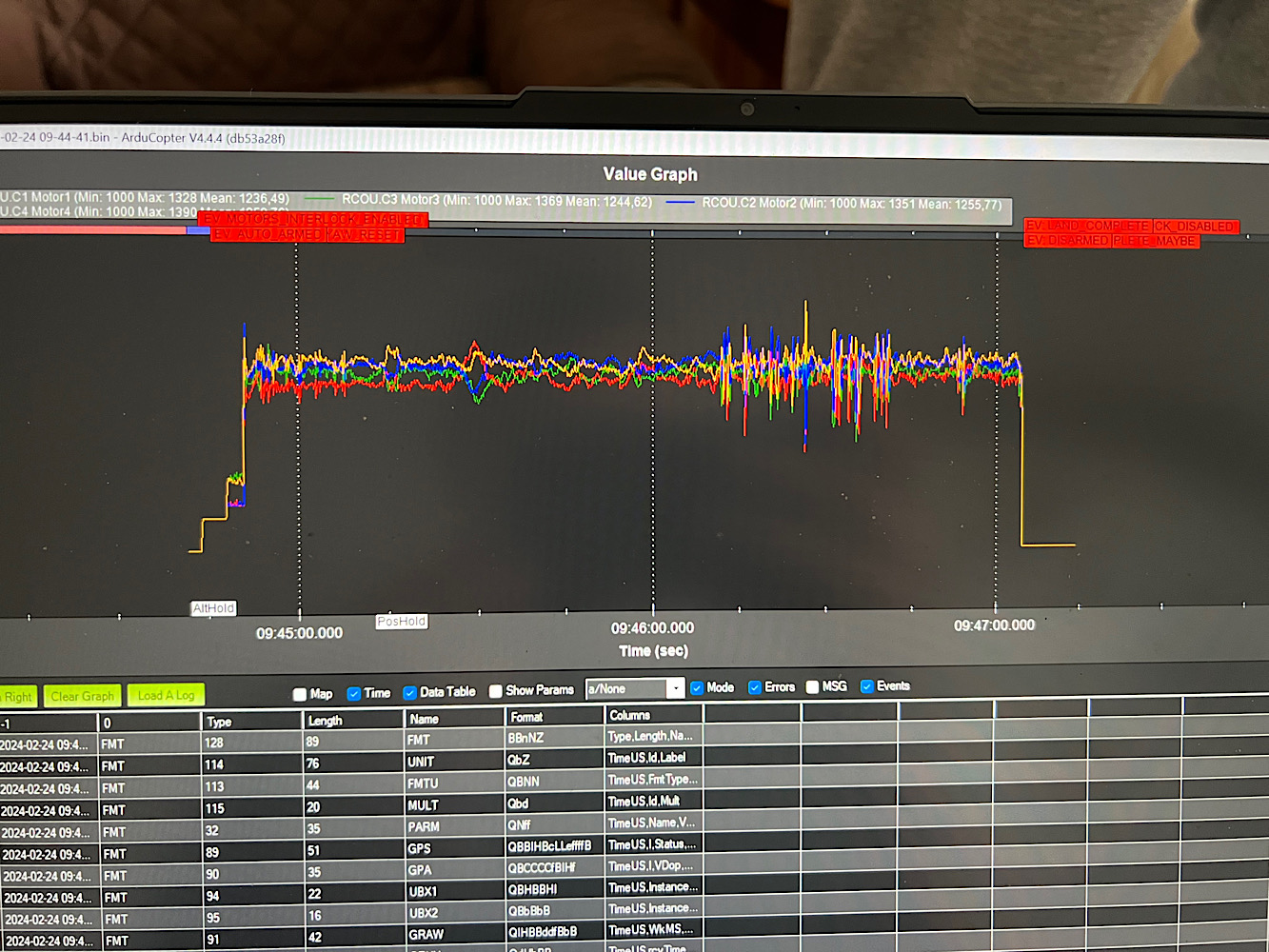
One problem you’ve got is (I think) quite a weight imbalance. This is causing the front two motors to work much harder than the rear two motors. Better balance will help reduce the spread of noise, and it will be better for attitude control.
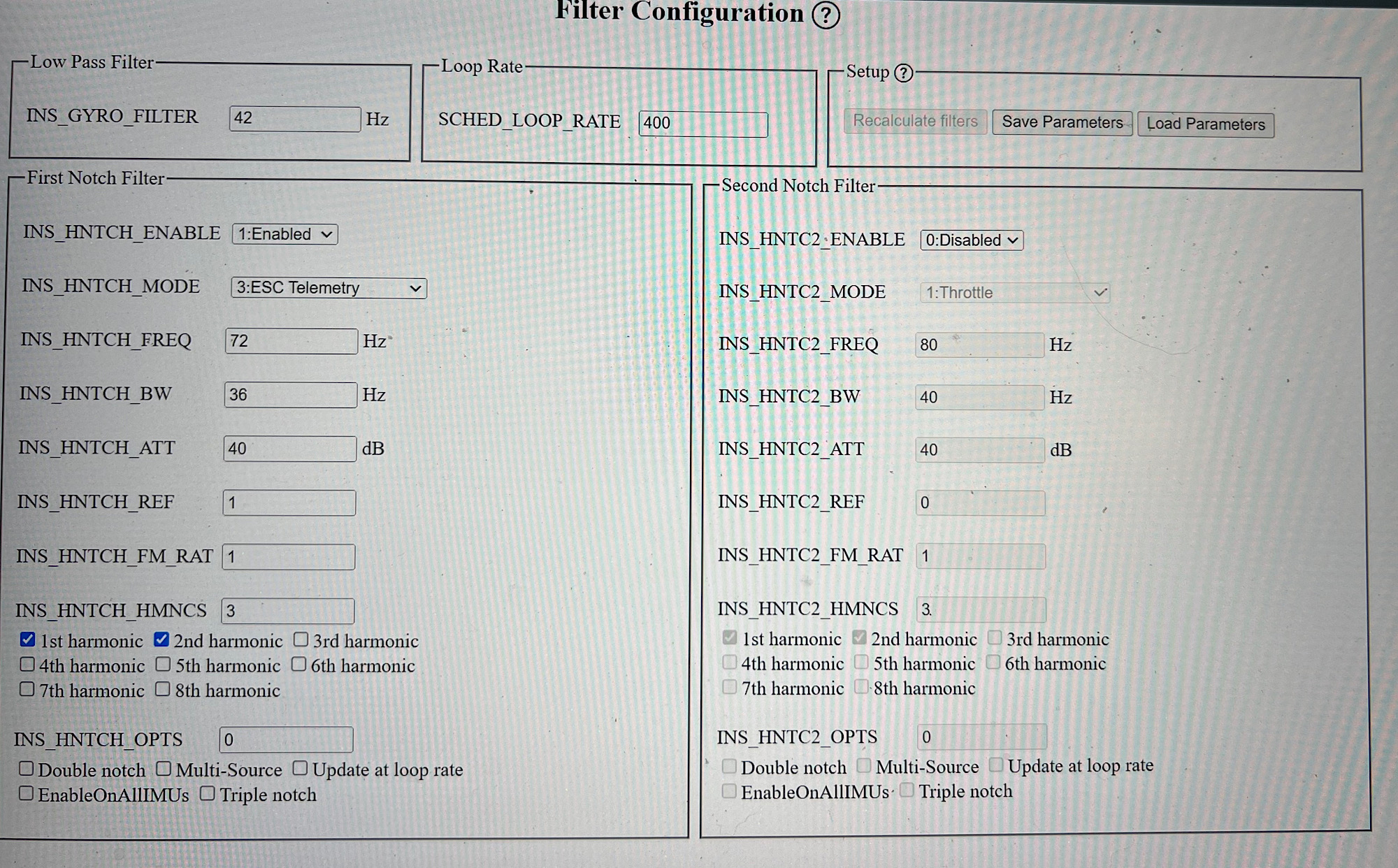
Set these to ensure the harmonic notch filter will go low enough in frequency to cover all the noise peaks:
INS_HNTCH_FREQ,50
INS_HNTCH_BW,12
INS_HNTCH_HMNCS,1
INS_HNTCH_OPTS,2
You didnt need the extra harmonic, but this also adds in a per-motor notch since you have all the ESC/RPM data available. When using the per-motor notch, the bandwidth can be 1/4 of the frequency.
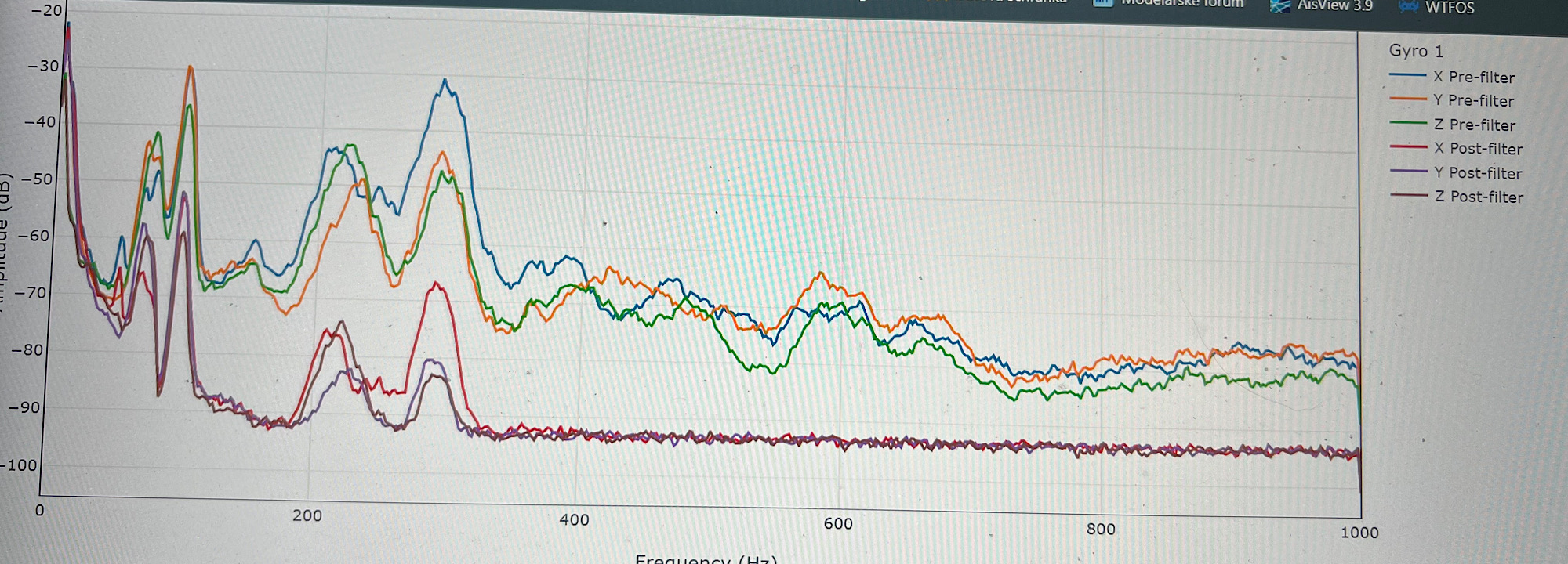
The ESC/RPM data will scale up the frequency and bandwidth as appropriate, but they have to start lower than the lowest expected values.
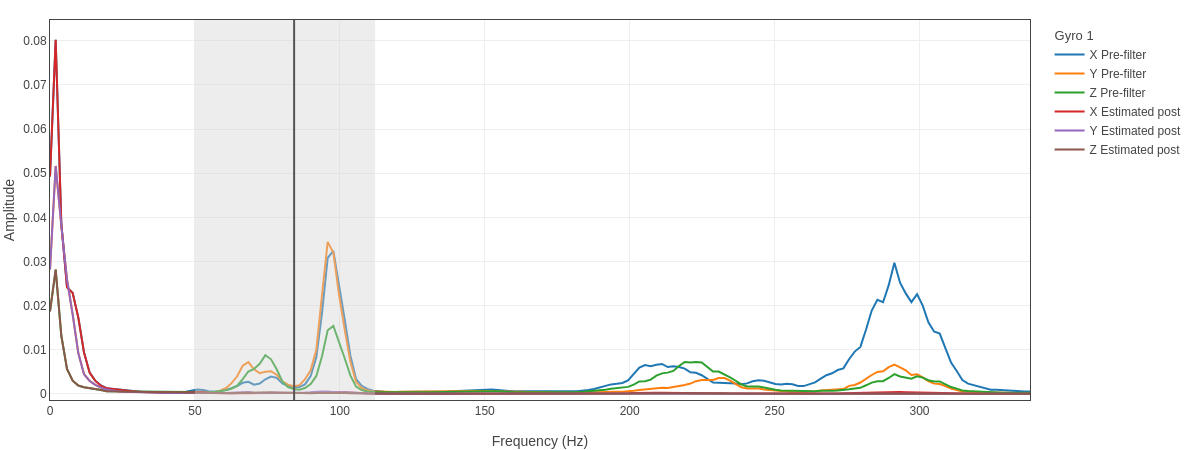
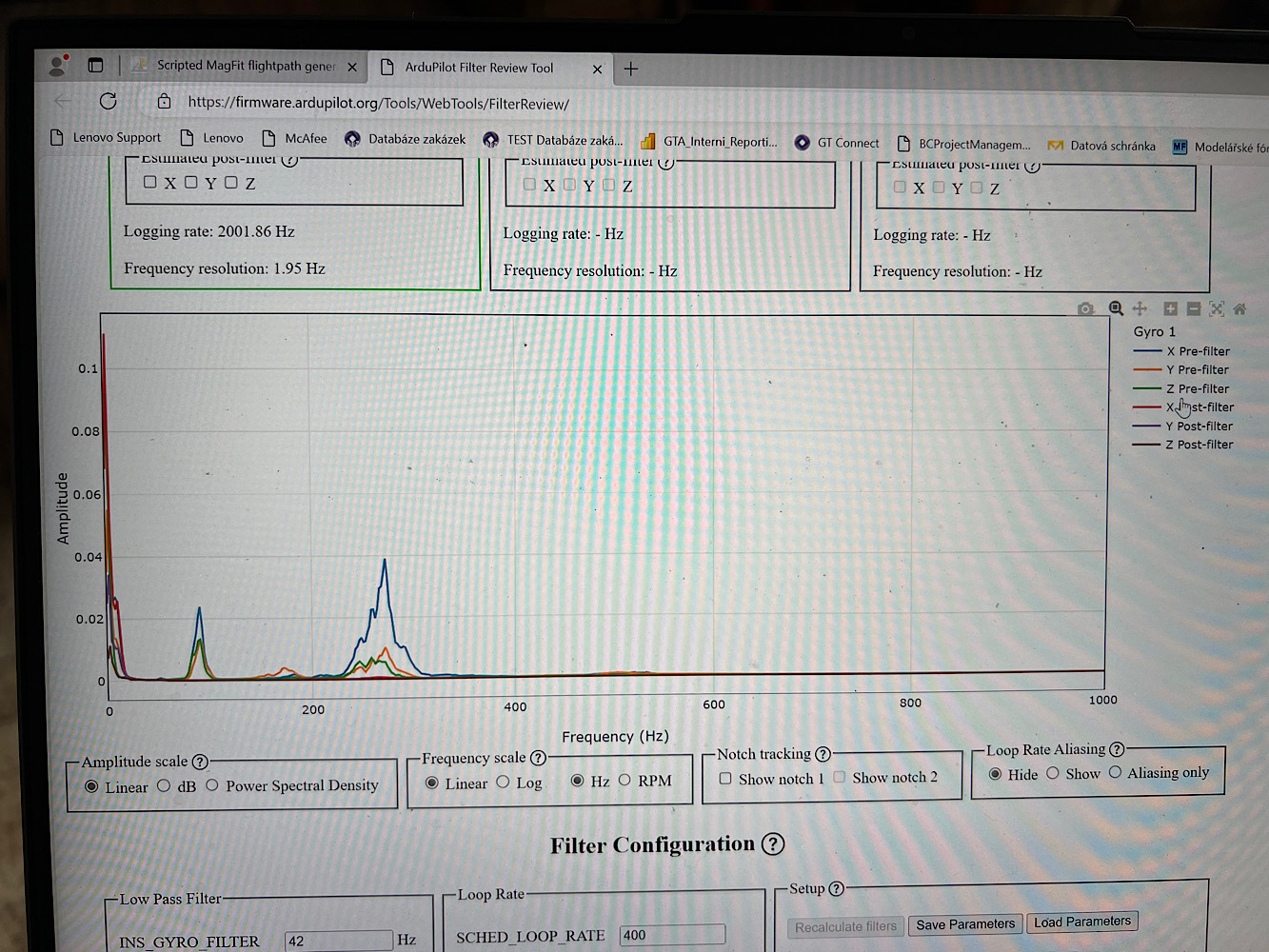
You can see you have those twin peaks at 70Hz and 95Hz, and their harmonics at 215Hz and 290Hz - that is because of those motor outputs being so different.
If you balance the copter better, you should just have two peaks instead of four.
1 Like
I also meant to say, the graph is much clearer and seems to be more of what you expect when you select
Amplitude scale : Linear
Firstly thank you very much for your help. You are right that that linear scale view is much better. Please what are the parameters in MP log viewer when i can see that front two motors to work much harder than the rear two motors. You are right with the mass distribution - i have heavy battery and the battery was not attached at CoG. I am ready to make some tests with battery placement but dont know where in the log i can see relevant data for decission
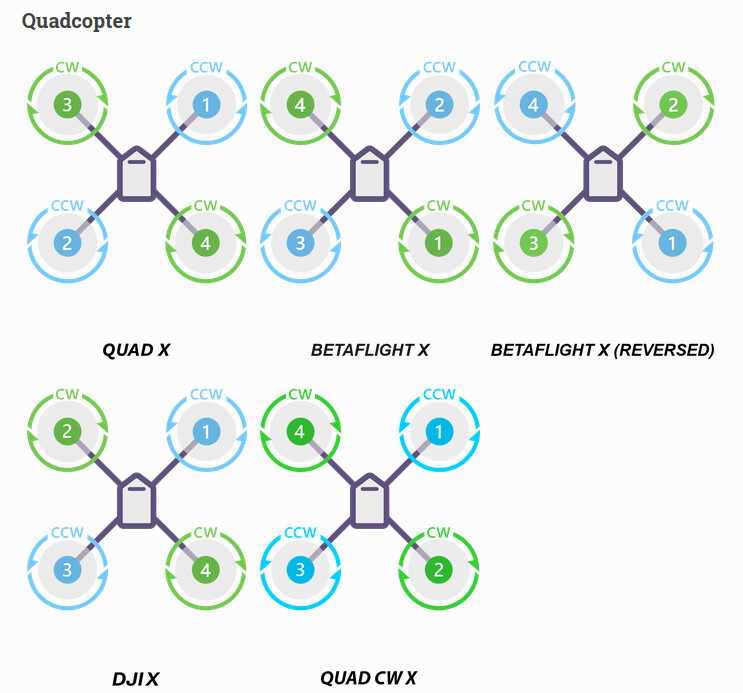
In logs it is RCOU (for RC Out) and when you hover over the C1 , C2 and so on, a little pop-up tells you the motor number assigned to that output.
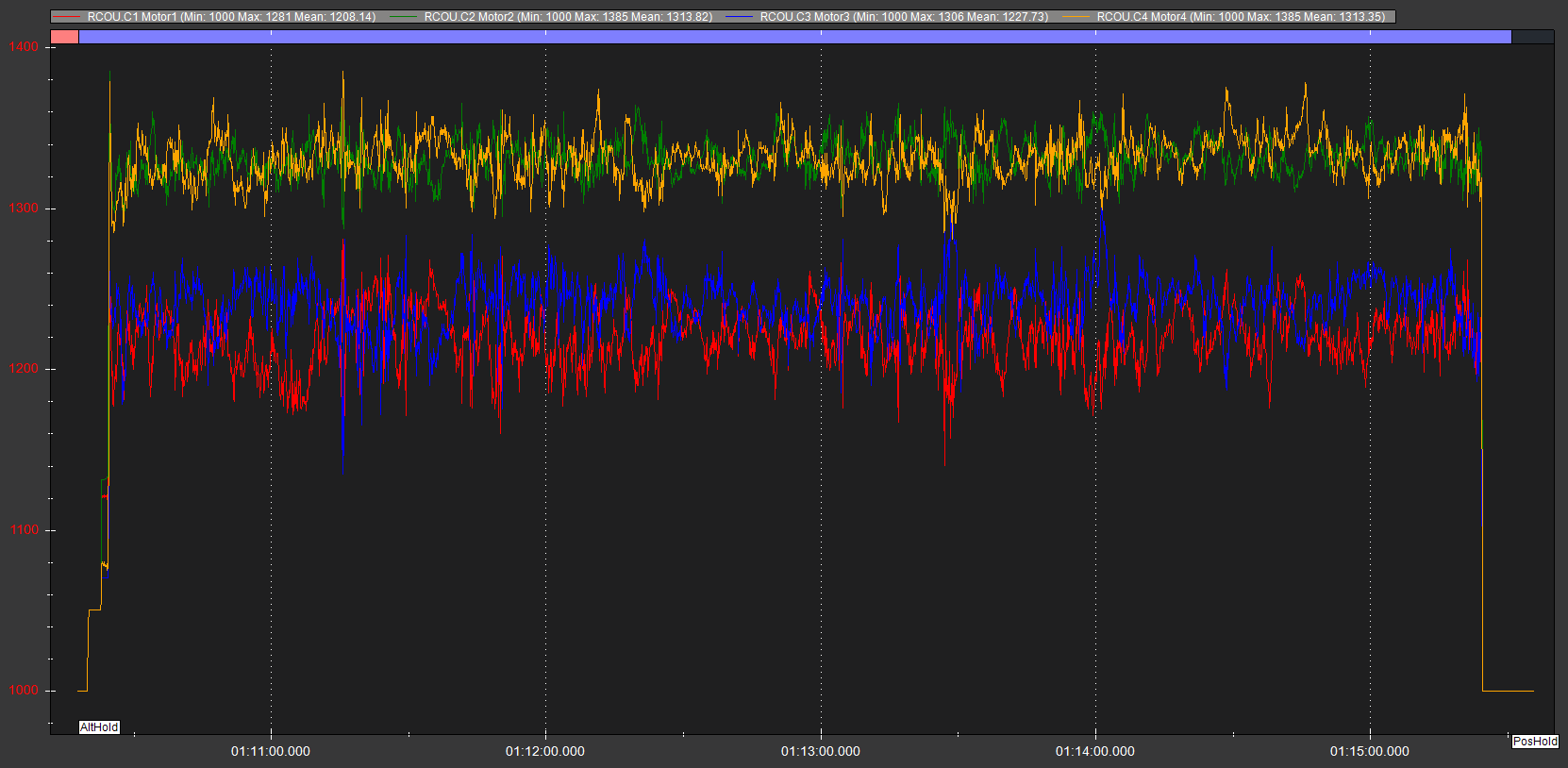
You can also see it in the ESC data, RPM, but it’s easier to use the RCout because you have to also equate the motor numbers to your frame type and class to work out if it’s :
- a weight/CoG issue
- or a problem with twisted motor mounts affecting CW or CCW motors

I change notch filter accourding your advice as well as I change CoG. But I got huge vibration after those changes (see video).
I also realised that i need much more power for take off (before it was cca 1/3 of throtle now I need 1/2 of throtle to take off). My learned hower point was 0.125
OK, that looked very poor.
Can you upload that log for us to check please?
I don’t know why but sometimes parameters don’t save event though I write them. That flight was mistake. Below is attached new log with filter setup according to your advice. It is better. Problem is still that front motors work harder than rear ones. I move battery in the end of the holder - values from front and rear motors are closer than before, but still not enough. I try to specify center of thrust and on my dead cat frame is on the back part of quad. I think I must design new holder …


OK that log looks OK.
The filter is working perfectly, so that job is done.
It’s not quite ideal to have some difference between motors, but it still works. Just be aware that two of the motors could more easily reach their maximum output during certain maneuvers and that could affect attitude control.
You can safely set these:
ATC_THR_MIX_MAN,0.5
LOG_BITMASK,180222
If your battery is Li Ion then moving it around will affect the compass calibration.
Li Ion batteries require a system where they always go back in exactly the same place, and same orientation.
Once the battery is in place, redo the compass calibration by performing a flight with plenty of yaw and some ascents and descents, then we use that log and Magfit to make adjustments:
ArduPilot MAGFit
We can help with that Magfit too.
2 Likes
Hello, finaly I made new battery plate and can move the battery. This is result of battery shift. Are motors rcout and notch filters
ok? I would like to make imu temp calibration but i have small freezer for 10” drone. Any idea how to do imu calibration without freezer and outside is 10 degree of celsius?
Remove the FC and place only the FC in the freezer.
Or if that is not possible, take it outside and do it there.
Some temperature compensation is better than none temperature compensation.
And use the offline tool, it allows you to see the results and test their validity.