Trying to learn about notch filtering and would appreciate some advice on my log please. What would you change?
Have used Dynamic mode but since I have ESC rpm telemetry data perhaps its better to use that mode?
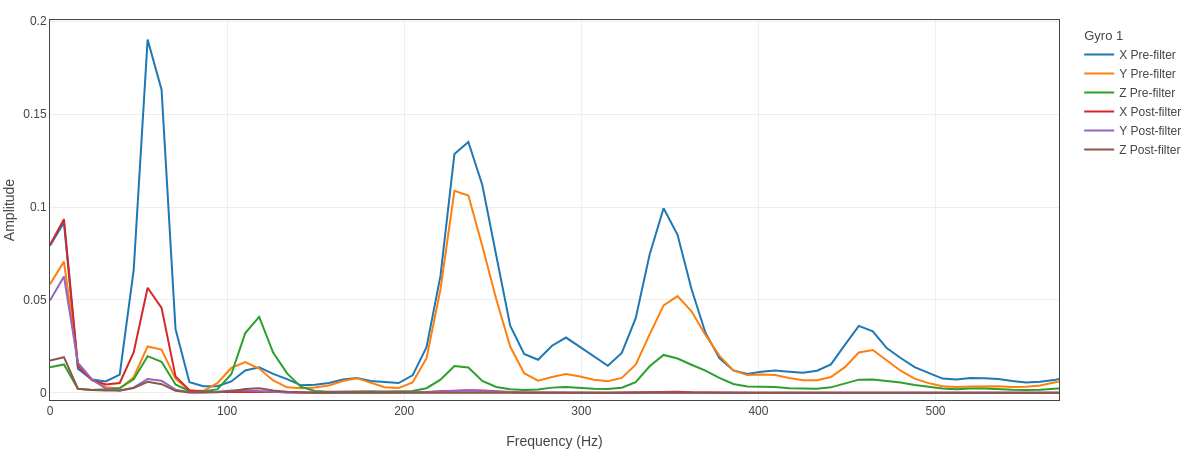
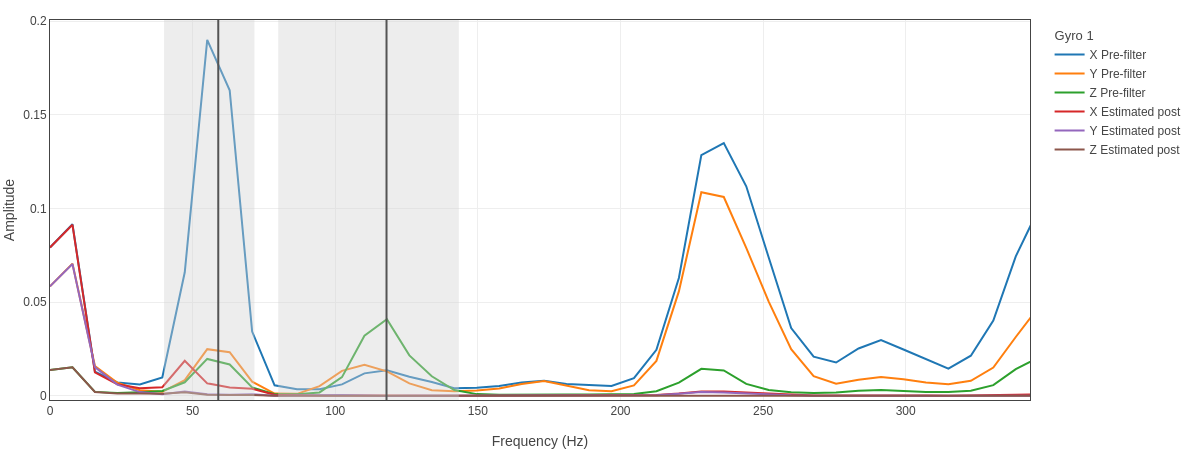
My props are doing about 3300rpm and there seems to be a considerable 4th and 6th harmonic but I think the vibration levels are fairly good?
The frame has silicone isolation system so the data may be slightly non standard.
You may remember my other posts with regular mystery crashes. Well the last 2 items remaining from the first series of crashes have now been replaced (ESC & RX) so fingers crossed.
If you fancy taking a look at the file, its the latest one (that didnt crash) called ‘Notch filter test’.
Using both are OK - the RPM data via BDSHOT arrives more frequently but there is no special consideration required. The telem rate can be reduced if required. SERVO_BLH_TRATE,10 down to 5
The data from the telemetry wire includes much more than just RPM, and is very useful for diagnostics.
In your log all the extra harmonics are not getting passed the gyro filter - see the post-filter lines along the bottom of the graph. So there is no special consideration required for anything but the 1st and 2nd harmonic.
Thanks for that Shawn. Fun and games this morning. Tried the new settings and copter just wanted to flip over every takeoff. Put back original setting and still same problem, tipping over and digging in props. After scratching my head over the logs tried the MP motor test and some motors took 20s to ramp up the set power. Long story short (about 4 hours messing about) I changed some ESC (BLHeli32) settings (not ramp up) and all now seems ok. Why was it flying fine yesterday on same settings? Mystery.
I finally had a bit of time to mess with notch settings. Tried your suggestions. Seems good. Also tried a few more exotic like multi source and triple notch. Short flight - it seems very locked in or perhaps thats my imagination as I haven’t changed any tuning.
Question. If I disconnect the ESC telemetry wire I get no ESC data via the BDshot. It is enabled I think. Is there anything else to do. Should the BDShot telemetry data just replace the UART connection?
Second question. That Vibe filter app is excellent but I dont think it shows what is ‘good enough’ or ‘excellent’ so you know when to stop chasing the settings. Your pic above shows a different Y scale than I seem to have available. Also what is too much phase lag. Is mine bad?