I have installed mission planner, plugged my pixhawk in loaded the latest copter firmware,set frame class to 8.
And it’s still not working, yaw doesn’t work, and pitch and roll dont work, see the video linked below for my problem.
Note: these are not flight fins these are only here to show the servo numbers, I have them all plugged into main output 1,2,3,4 and my main motor on 5
Everything seems to work for your servos (assuming you have one plugged in main motor 5).
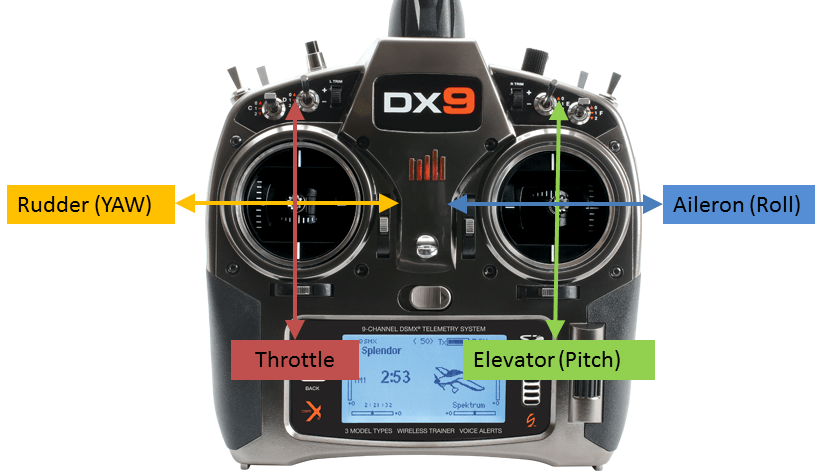
The problem is that your radio is not set properly. When you thrust up, it’s doing the yaw movement. By default ardupilot considere the channel 3 of you transmitter as thrust, see the doc on the basic RC channels here to set your radio : https://ardupilot.org/copter/docs/common-rcmap.html
You can either change your radio to send thrust on channnel 3 or tell ardupilot to considere channel 4 as thrust. Of course do this for every channel and check that Pitch/yaw/roll/thrust are all at the right place.
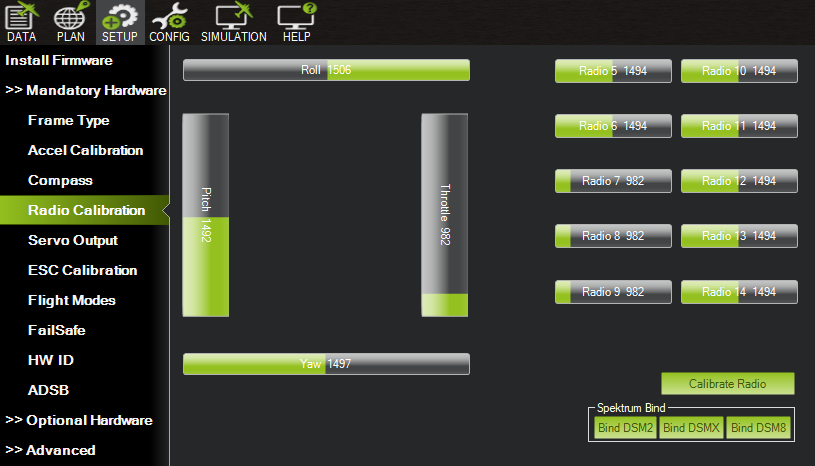
You can see what ardupilot is recieving as pitch/roll/yaw/thrust in “radio calibration”.
Just tried it and it didn’t work unfortunately, I’m trying to do a ducted fan rocket but I dont know why it’s not working to get it working , its literally just a single copter with a extended shell
Setting the radio channel didn’t work ?
Or did it work, but the servos still do the same thing ?
Can you show the radio callibration tab moving with your controller. And, if you changed the radio setup, could you, once again, show the servos moving with the controller
I tried what you said it didn’t work at all, I’m not sure if it’s the flight controller, which is a pixhawk fmu3, and I am using a 8 channel radio from radiolink
It should work, if not, please send a new video of the servos’ movement like before (with the numbering). I’m pretty sure it will work, but you may not recognize the movement when armed since it’s not exactly the same as the documentation that describes the non-armed movement.