Hello there, I am using 30*10.5 inch propellers and t-motor 8014 100 KV motor and 12S 22000mah battery as propulsion system I have seen this problem that my pitch axis of the quadcopter is not tunning perfectly in the autotune mode while roll is completely tunning. Please someone help me out of this.
I am attaching the logs for manual tunned pitch and autotuned one.
Read and follow the How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide. Download the .zip folder with the param files from the guide, edit each file to suit your copter and upload them one by one as you read along. The guide tells you what to do and which file is needed at any given time. Do not skip any steps!All the steps are essential for all of the following steps (i.e. it is pointless to do notch filter setup and autotune before you did the IMU temperature compensation). Anything that might seem like a shortcut will result in a worse tuned drone in the end.
We told you before to do this and you didn’t. The way to get a well flying drone is to do the configuration right from the start, otherwise you get a patchwork of little fixes and are completely lost what you did already and what you didn’t.
Please tell me that I tried roll autotune in the same configuration it tunned perfectly!!! But atlast it not tunning well in pitch axis please tell me I am attaching new manual tunned logs for the pitch axis please see the logs once I attached for manual tunned please!!! And tell where I am getting wrong…
Does your drone have a drastically different inertia in roll and pitch?
I’ve had a similar issue as you did, autotune did a pretty good tune in pitch but a really different one in roll. Autotune isn’t perfect and you’ll probably get different results if you do it again. In my case, since the roll and pitch axes of my quad were nearly identical, I just copied the pitch gain values to the roll gains, and the drone was flying much better. And then some manual fine-tuning was required.
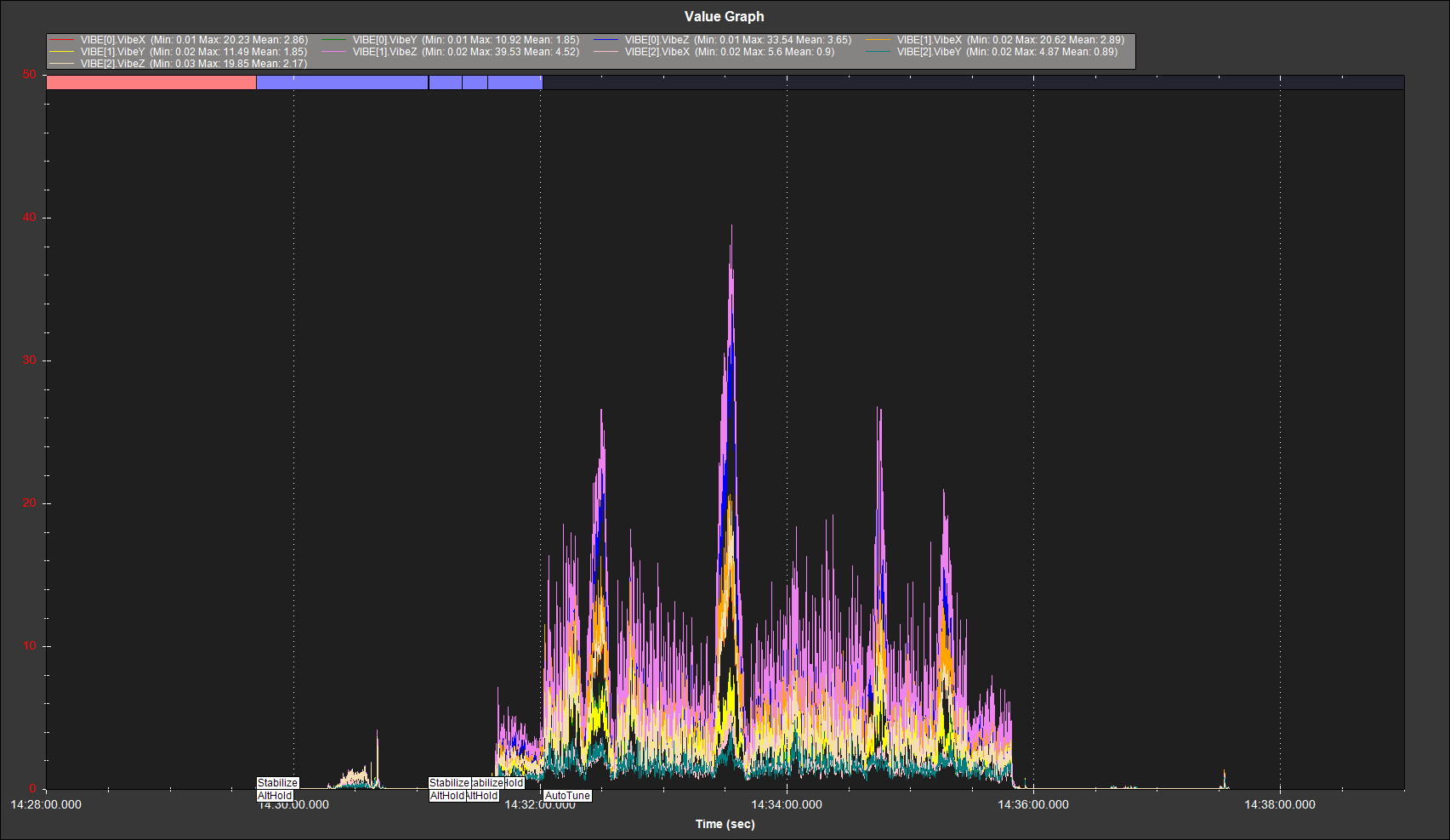
Here I attached my copter image for your reference. I get your point very well as I want to ask about your copter mass distribution. According to the attached image you can relate that our copter have mass distribution along with pitch so we get problem in pitch only. Do your copter mass distribution is along with roll with reference to our drone . We also found out one problem that ,when we are fly our drone without damper we get higher vibration in z axis while backward pitch while in forward pitch
We tried using damper and also stick all the cables and wires but still we get vibrations 15 to 20 normally. Can you suggest us some more solutions for reducing the vibrations. There are no any tanging cables connected to the pixhawk which will cause for the vibrations.