Hello,
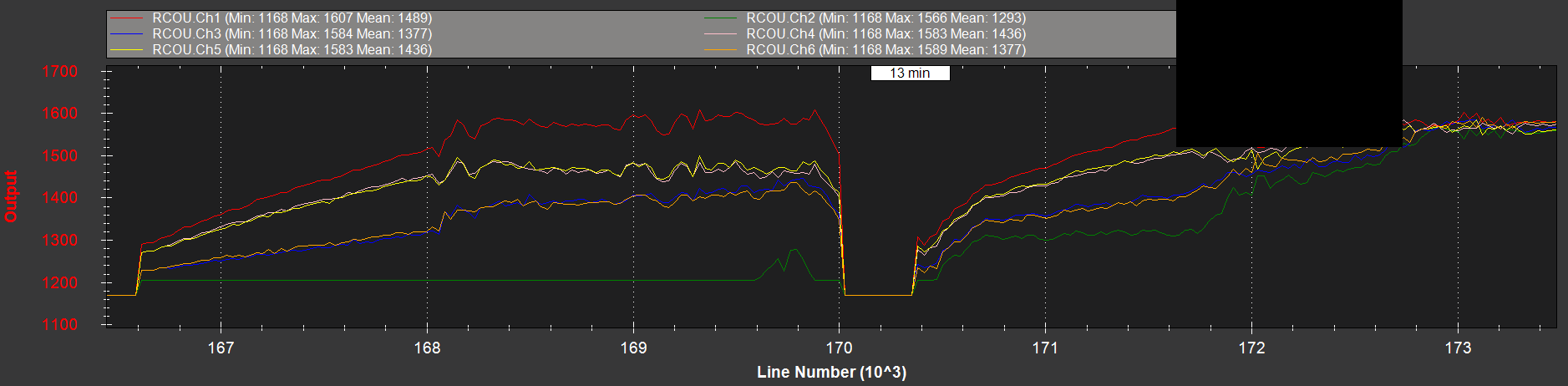
I have almost everytime small issue during take off in stabilize mode @pixhawk and arducopter 3.3. When hexacopter is on the ground and I’m increasing throttle, drone starts to tilt to one side. According to log file, motors one the one side are running faster than the others.
I did calibration of accelerometers and compass several times. ESCs, motor balancing, Auto Analysis is ok. I need to compensate this tilt by pitch/roll stick. Once when the copter is in the air, everything is fine. Maybe my starts are too slow… but still - I don’t understand to this behavior. I’m going to try other modes (AltHold, Loiter) for take off.
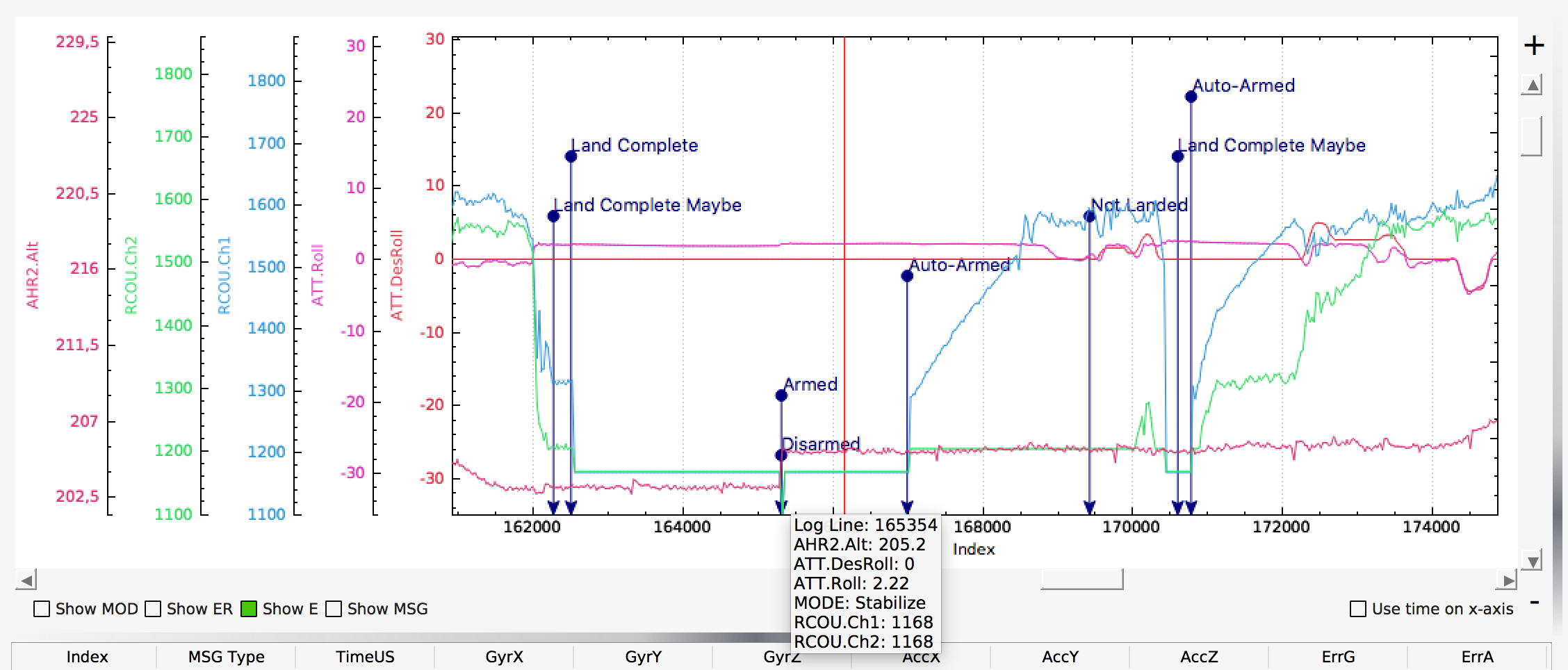
So far I can see in your log file (few areas in the log has been checked) you have a difference between measured roll angle and desired roll angle when your drone is landed. As soon as it taking off it seems that mentioned values get converged.
Cannot be definitely sure but root cause could have some relation to poor-leveled landing gear or not-leveled landing place. Unsure, but it might have relation to poor-leveled controller dampening/mount.
Also, I believe you need to perform accelerometers calibration once more and to pay especial attention to drone leveling at position “level”. IMHO it is most important position for calibration procedure.
p.s. it is good practice while taking off is to take it quickly to altitude about 1.0-1,5 meters and then hover it. This way your drone could avoid turbulence from his own airflows reflected from the ground.
Hi, thanks for the investigation and tips.
The screenshot is from the Mission Planner ? How did you config like that ? Multi-y axes, waypoints, nice tooltip… ?
Difference between rolls is before or during take off? I suppose the difference should be corrected really quick when the take off starts…
The copter has been leveled on the ground in my flat so it should be leveled properly. I will check it again.
I.
My screenshot is from APM Planner, I just removed some extra view options to make it more clear.
So far I can see the difference between rolls is while your copter is on the ground. As soon as it takes off roll values get converged.
Unsure, but here is a chance you have no issue at all. It could be a way you taking drone off may lead to behaviour like that.
As @dipspb said, be aware of not spending too much time on the ground spooling up, as errors build up over time and can lead to problems.
Getting the copter off the ground promptly is important, but it only needs to be to a metre or so.
Don’t forget you also have ground effect to deal with.
Most new builds I find tend to want to tip on first takeoffs, mainly because you spend too much time spooling up.