Hello,
I was testing RC6 last 2 days and I had GPS position stability issues. My GPS settings (no blending so far): GPS_TYPE=2, GPS_TYPE2=2, GPS_AUTO_SWITCH=1. I was using stabilize, althold and poshold modes and sometimes was poshold mode acting like althold. When I pushed and released rool/pitch stick, drone didn’t stop and fly away in the same direction. Or when I stopped it in a wind, it fly away with a wind.
I have 2xM8N installed, signal was pretty good I think…
log file: 2017-05-25 11-14-29.bin (4.2 MB)
I.
EDIT: I was tested also blending mode (GPS_AUTO_SWITCH=2) but it didn’t help. What is interesting, Loiter mode works well. Now I’m confused if it is HW or SW issue. GPS signal is good, hdop low - is it enough to prove that there is no interference or noise ? I noticed that my 600mW telemetry (@433MHz) antenna degrades accuracy when FC is disarmed - when I’m watching drone possition in MP, it is moving within 10-15 meters. But still hdop is about 1.
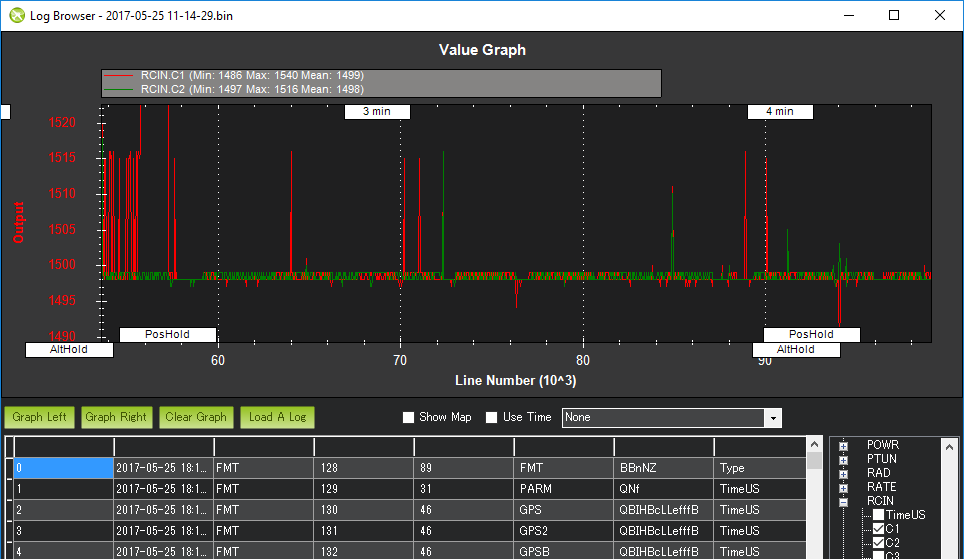
If you can’t find the cause of the twitches then you can set RC1_DZ to 30, RC2_DZ and I think the problem will be masked.
I’ve also just remembered that we reduced the roll, pitch and yaw deadzones between AC3.4.6 and AC3.5. This would explain why you and a few other people have started noticing problems. I think we will increase the deadzones a bit. perhaps to “20” (they were “30” in AC3.4.6 but only “10” in AC3.5-rc7).
Great, thanks for the reply. I noticed that spikes two weeks ago and I was trying to find root cause but not successfully so far. I thought that it can not be related to this issue when Loiter mode works fine and PosHold doesn’t.
I will try to increase deadzones againg to test it… or better remove spikes
Again, thanks for the clue…
Today I was flying about 20 minutes nad stabilization in poshold mode was great. Deadzones set to 20 so thanks again.
According to testing, the peaks are caused by transmitter Devo 10 and I’m not able to remove them. There is a position error and sticks calibration is not helpful.
Hello all, I am having a very similar issue. In PosHold, when release the sticks, the drone keep drifting for while like AltHold mode. I had to add a BRAKE mode switch while fix this problem. I have already checked RC1/RC2 for glitches, DZ´s and PHLD parameters, but no luck yet. I am attaching the last .bin file to see if anyone can help me to find a solution. Thanks in advance. The configuration is a Y6-PH2.1.