I enabled the q_enable and set q_frame_class = 1 (quad) and q_frame_type = 3 (H) as per the instructions. My q_tailsit_motmx is set to keep all 4 motors enabled in forward flight as well as in hover.
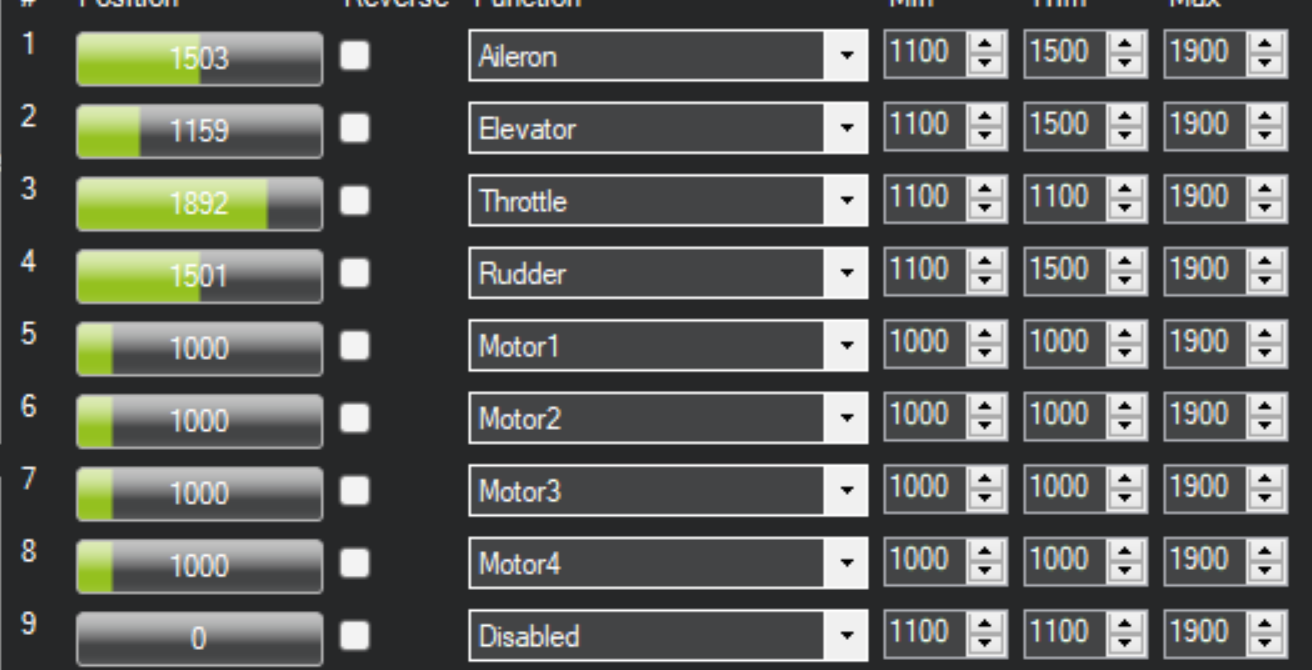
The issues is - when I command throttle it is not picked up by “Motor_n” servo outputs. However, if I set my servo output function to “Throttle” - it works just fine.
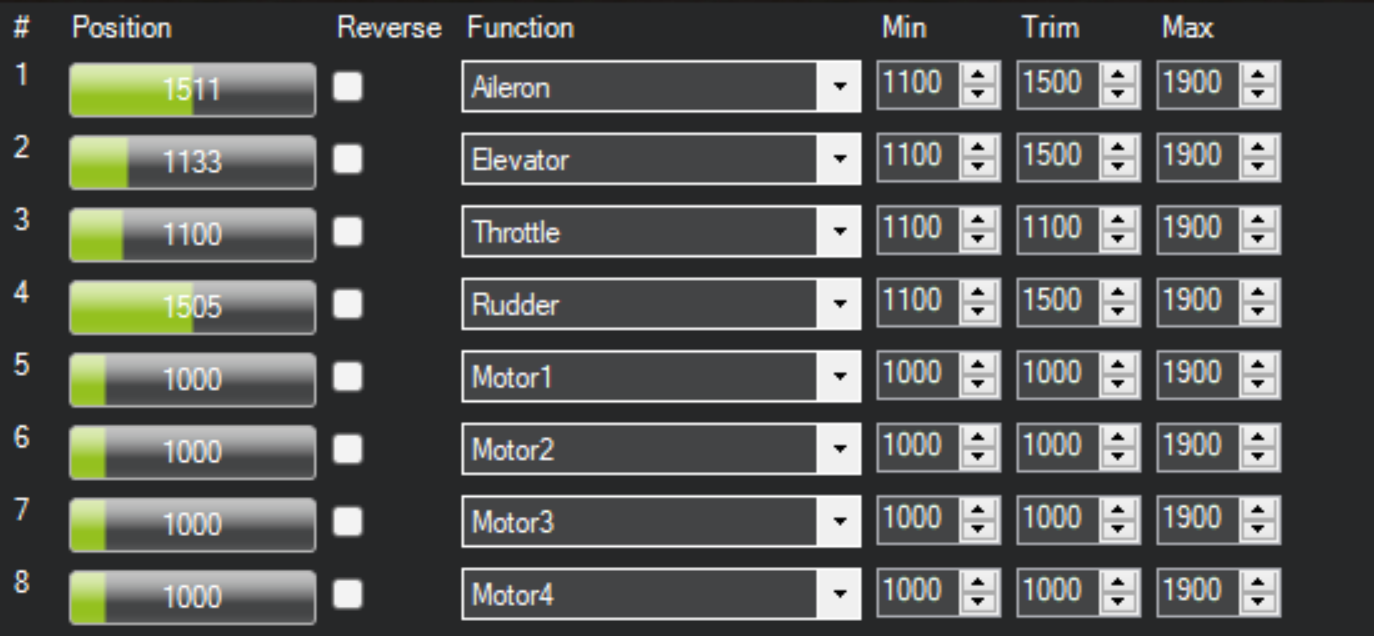
Screenshots are attached below. First image has my throttle stick fully up, second has the throttle stick fully down. Any help would be highly appreciated !
The sticks don’t control the VTOL motors directly (or at all in manual mode).
Remember, motors 1-4 are quadcopter motors and (usually) shut down in FW modes.
wanted to post a solution for anyone who may get stuck with similar issue: turned out I was missing physical arm/disarm switch on my radio. I thought when I removed the arming checks in parameters it also canceled the requirement for the physical switch - turns out I was wrong. Requirement for physical switch is on a different parameter