ARDUCOPTER 4.3.6 running on CUAV V5+ .below is the system used
Hobbywing X9 propulsion system.
12S power system . 34 inch propeller.
Skydroid T12 Rc system
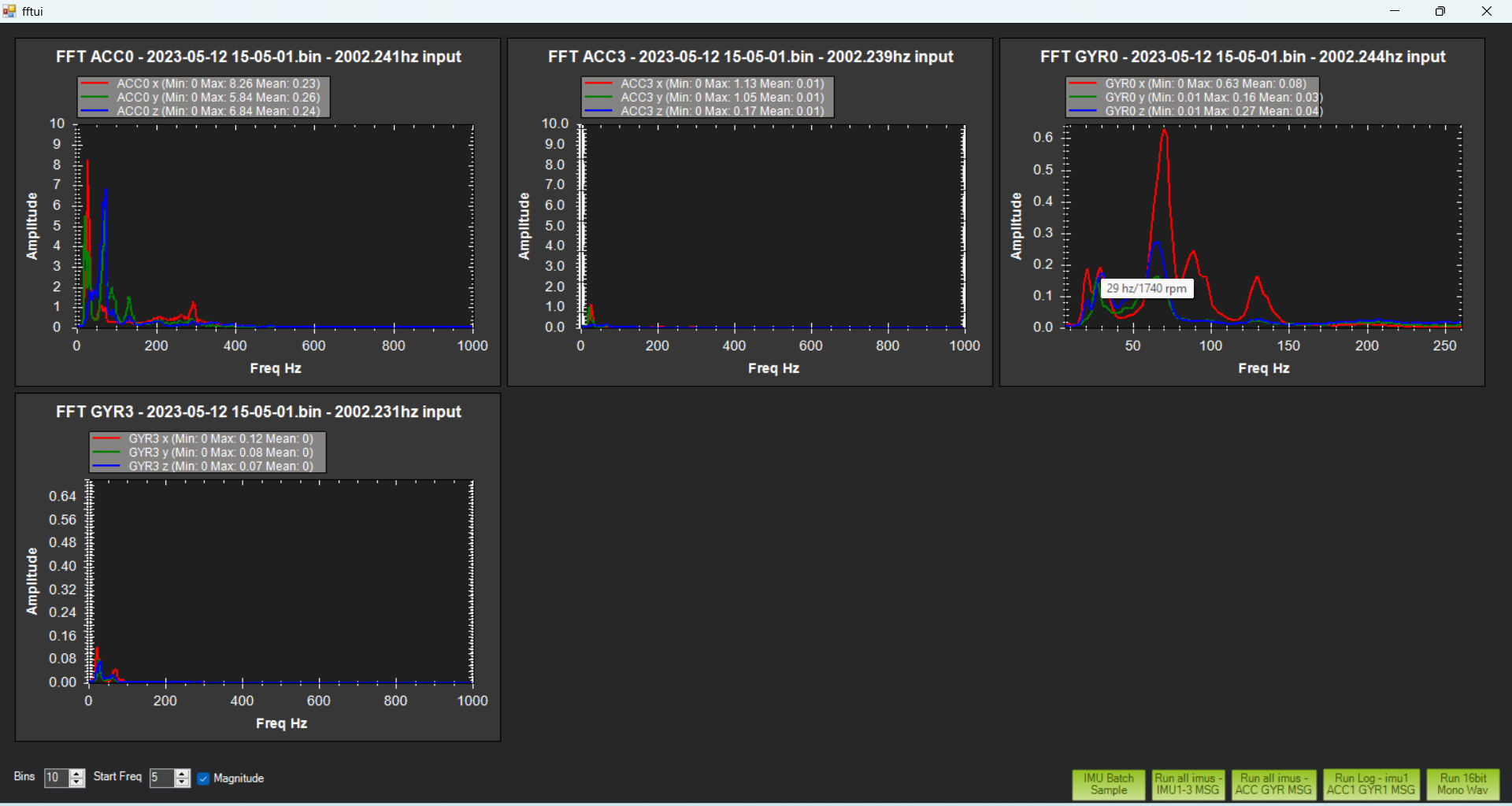
As per the Tuning instruction i have made all the setting and collected flight log with INS_LOG_BAT_MASK = 1 & INS_LOG_BAT_OPT =4
as per above FFT log i have found
INS_HNOTCH frequency as 30
INS_HNOTCH BW as 15 with
INS_HNOTCH _REF = 0.2
i have attached log below also in google drive;
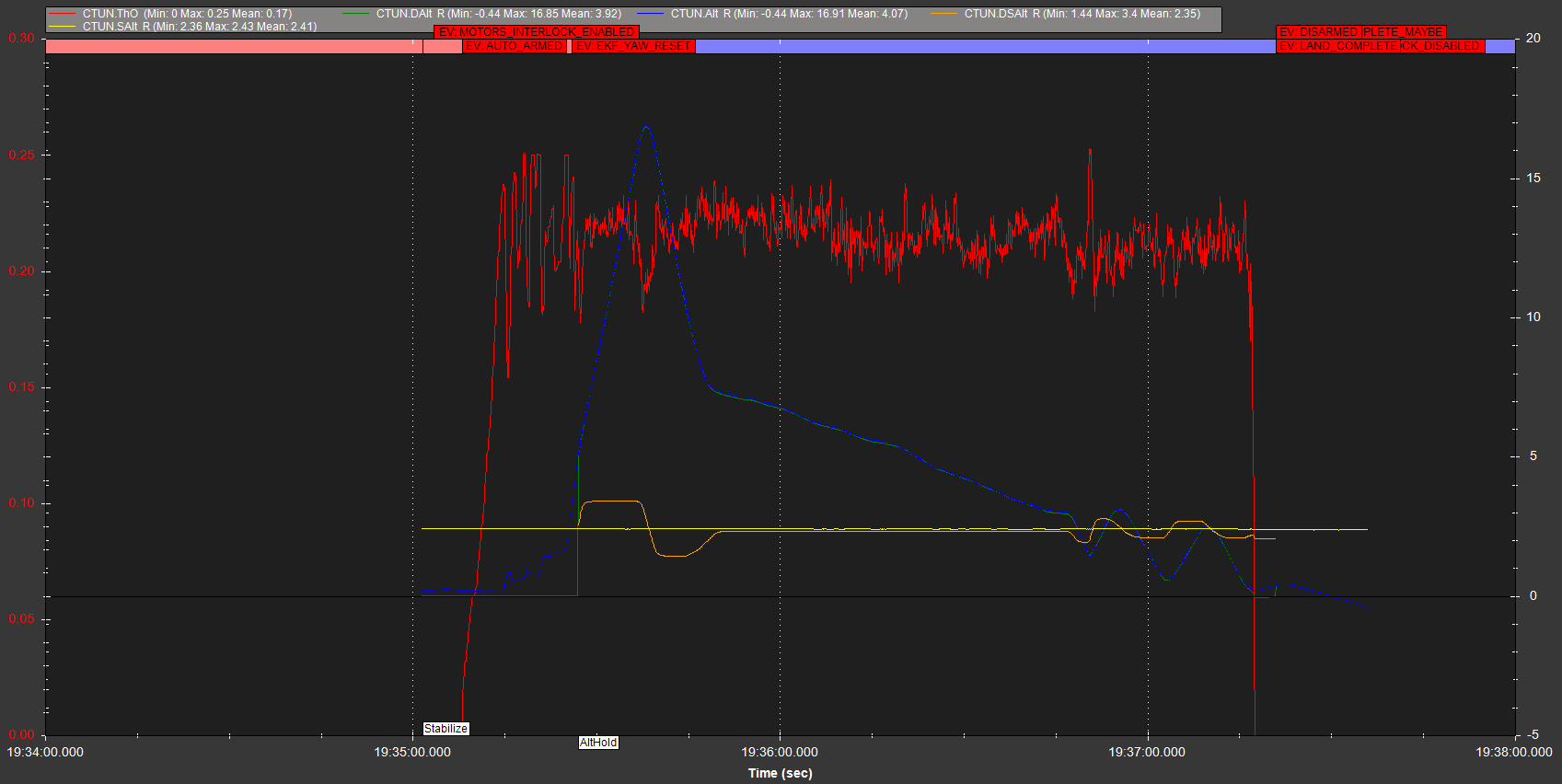
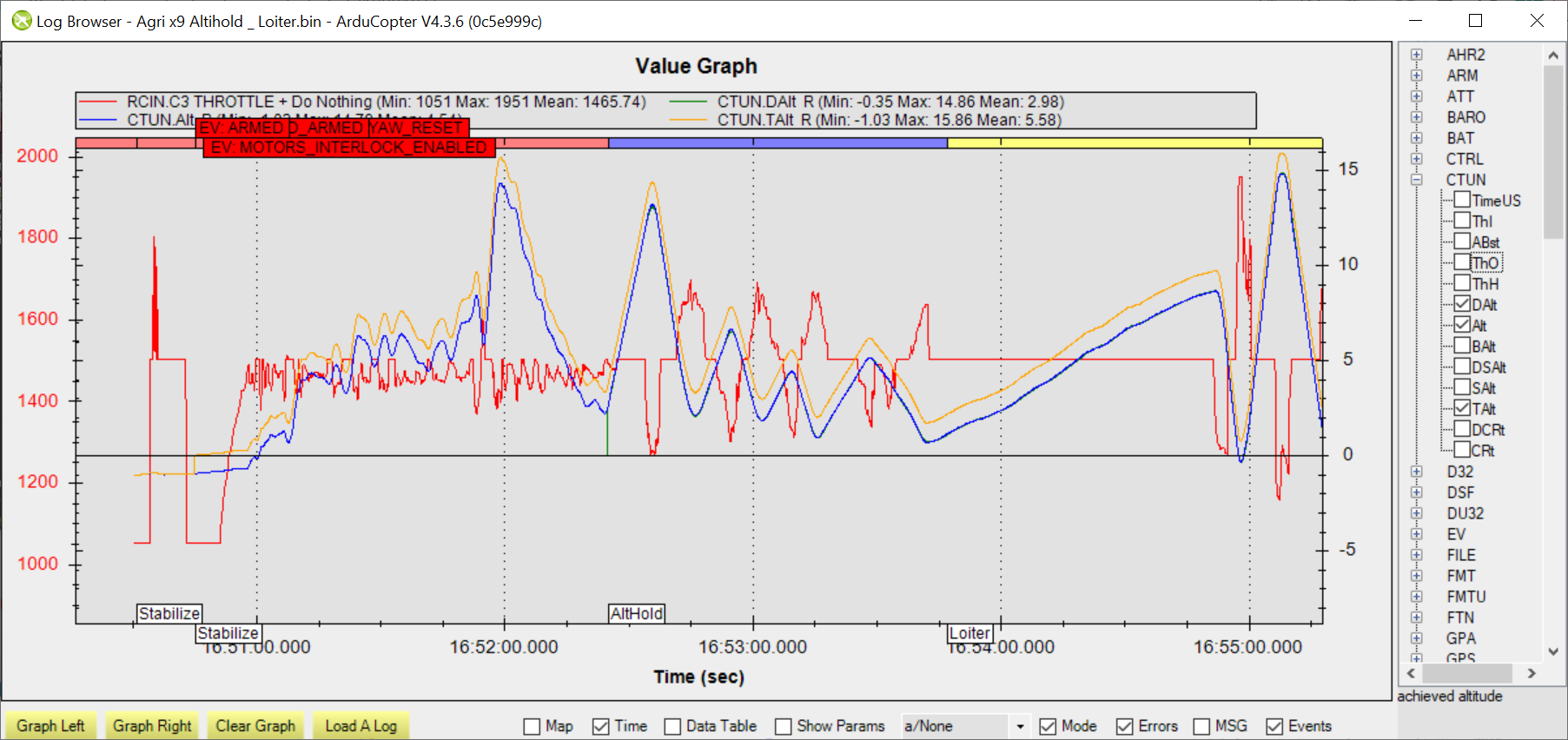
i have changed Althold flight mode and copter is not maintain height as if i increase the RC3 height of the drone keep increase in height even i keep the RC3 to center position to stop the drone i have to down the RC3 and again Centre to stop the drone. Similarly for height downwards also.
I have seen RC3 while flying its well Centre position. this is happend in Loiter mode too.
here is the log: Hobbywing X9 Propulsion System Agri - Google Drive
Note: i have another drone with same FC and propulsion system but that drone doesn’t have this issue. only change is firmware AC 4.3.3
The problem is there’s slightly too much vibrations, making the attitude control and motor outputs just a bit too noisy for there to be a consistent hover state. Have you got a photo of the flight controller and mounting?
Other than that, it looks like you are doing everything right so far.
I’m a bit worried about the battery type - is it Lipo or Li Ion?
I assume there is a generator since the voltage stays around 51 volts during flight.
This could be too high for Li Ion batteries and you might have to adjust that maximum generator voltage down to a maximum of 50 or 49 volts.
I would adjust the MOT_BAT and all BATT values based on the standard values for the battery type.
I would set these - even for “testing”
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
I would set these to suit your generator
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
MOT_BAT_VOLT_MAX,52.00
MOT_BAT_VOLT_MIN,39.60
but those wont change the hover performance unfortunately.
The problem appears to be the rangefinder altitude, which differs greatly from the baro altitude and GPS altitude (which do correlate)
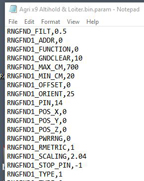
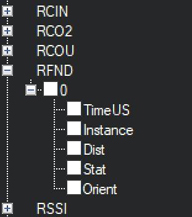
@dkemxr have you seen my parameter has any RNGFND parameters enabled ? i have checked my parameter file after @xfacta clarification there is no rangefinder parameter enabled.
if i enabled it i would get prearm error that not getting any data from it since no sensor i was attached.
Since this is a large copter and possibly flying missions at relatively low altitude, I would invest in a different GNSS unit like the CUAV Neo 3 Pro which has a barometer built in, M9N chipset which supports up to 4 simultaneous constellations and CAN connection.
If you have it mounted on the nice stand these come with the Barometer should be above most prop wash and should be much more reliable.
There are other similar units but without the barometer (from Holybro for example) and even having the higher-end or more modern GNSS chipsets (M9N, F9P) could give improved altitude accuracy.
Yes, but the Pro has the barometer too, and putting the baro up high in the GNSS unit out of the prop wash makes a big difference.
You could probably get a standalone baro and put it somewhere out of prop wash, but it wont be as neat and tidy as the Neo 3 Pro
If i use neo 3 pro over top of the prop wash area will it work? I have one doubt that if baro on openly placed with direct sunlight will have poor performance?
The Neo 3 Pro has the baro properly mounted inside and it’s not subject to sunlight as far as I know.
I’ve seen logs using the Pro and the baro readings where particularly good.
If you use a separate baro you would have to find a way of housing it, maybe in the existing GNSS case, or probably on the under-side of the GNSS unit. Maybe it could even be connected to the existing I2C wires.
EDIT
The standard baro within the flight controller should actually be OK if you’ve got a suitable cover over the whole area to minimise prop wash.
HANG ON!
The CUAV shop might be indicating the Neo 3 also has a baro - I’ll try and contact them and find out for sure, because yours is not showing a baro.
The range finder input is analog pin and it is propably the noise, then the Attitude controller will try to keep up with desired terrain altitude even when the drone was staying at the same position.