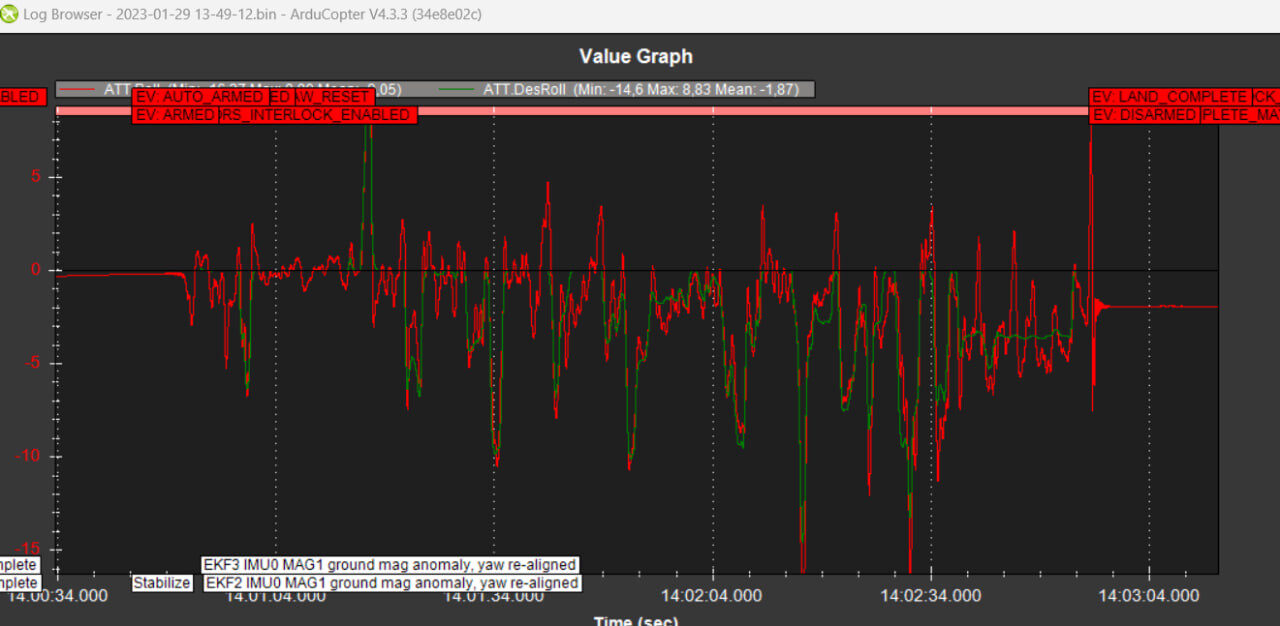
Hi, my drone(Tarot x8, 6.5 kg, 320kv motors, 40A ESC, 2 lipo battery 4500 mah 60C, 16 inch props, crossfire rc, pixhawk 2.4.8) is flying really bad, it can take off(it is firstefuly trying to flip, but then it corrects). Than drone control is really bad, there is no feeling like you really control it, it is making some weird moves, huge latency etc. I saw that my PID is very bad, also desired pid never less than 0 for pitch, and never bigger than 0 for roll. So maybe you know why is it happening?
https://drive.google.com/drive/folders/15wPY8ZesusXZBVfO-6A0vcByh8_nwUXh?usp=sharing


Disable EK2 (ek2_enable to 0) and re-start the flight controller. Set the PID Rate filters to 14Hz (not 10) and INS_ACCEL_FILTER to 10Hz.
Or you may want to reset to default and start over after disabling EK2. It looks like you made some random changes to the Rate Pitch/Roll P&I values.
BTW-Looks like you have one of the shitty 2.4.8’s with only 1 IMU. Lucky you.
1 Like
Thank you very much!