I’m trying to get the marvelmind indoor positioning working. It somewhat works but still some toilet bowling, but getting there. But yesterday during my test I encountered something strange.
When landing the motors didn’t wanted to disarm. I kept pressing down with my stick hoping it would disengage, but it didn’t. After waiting a bit the drone even started to raise again. Even though I was giving no throttle. I had to crash it to make sure I didn’t loose the copter.
I have the logs, but I’m not really sure where to look.
rcin, channel 3: gives a correct 1100
rcout, channel 3: suddenly goes back to 1500 and the baro gives a raise in height.
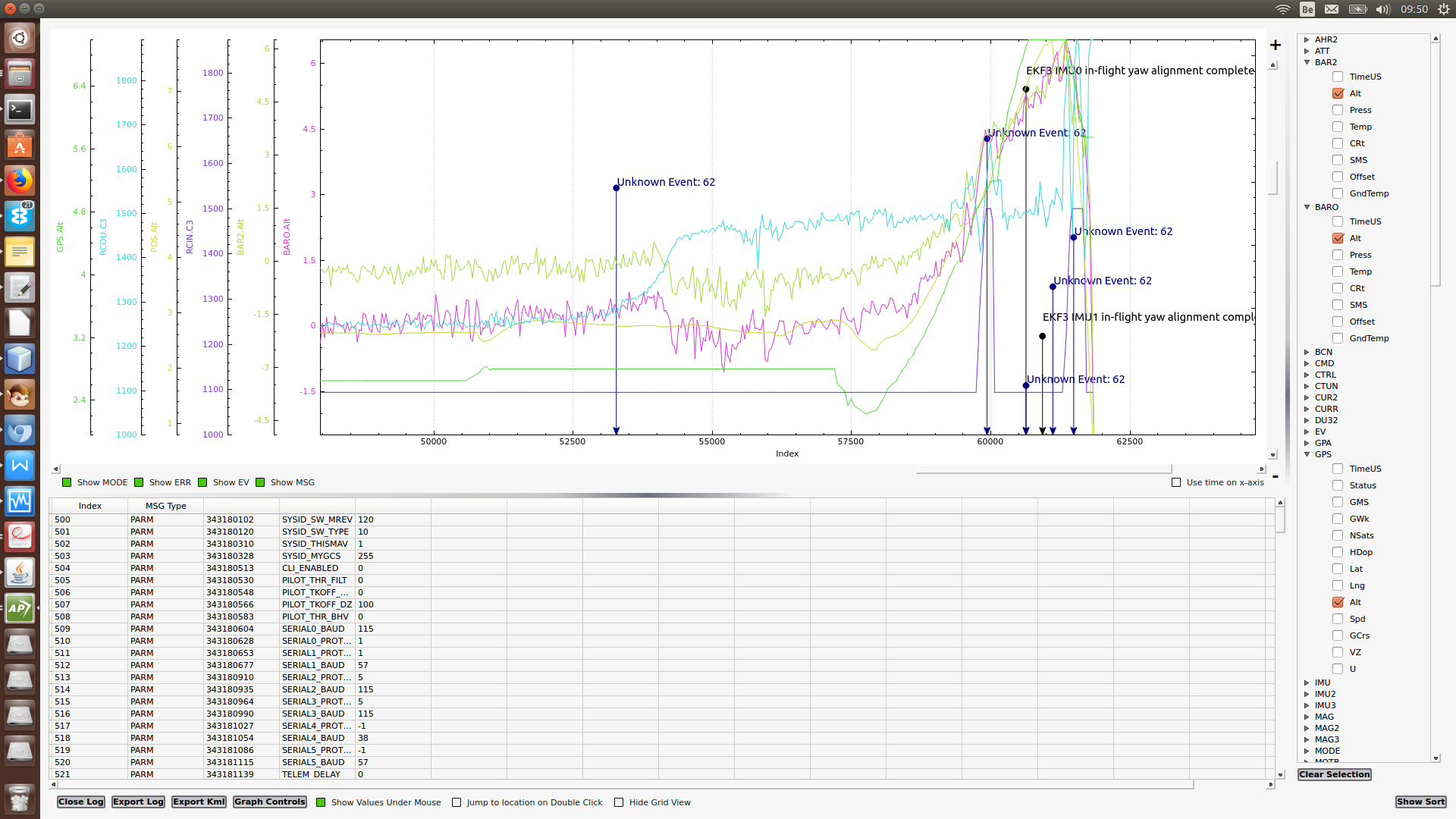
I’ve added a graph that shows what happened. You can see the barometer, the rcin of channel 3 and rcout.
Where should I look to understand what happened?
(Note: this is a pixhawk 2.1 Flamewheel F450 build)