I recently built a f450 frame. I am using APM 2.8 with 3.2.1 firmware. And using flysky fs-i6 transmitter and iA6b reciever. The problem I am facing is that my f450 Quadcopter is not at all stable in winds. Even in very little windy day. It wobbles a lot. Many times it just flips over. But it flies good in non windy day not the best but controllable it sometimes wobble when I lower my throttle.Is there anyway I can make my drone stable in very high winds like the winds near sea shore??? I am giving the parts links that I used to make my Quadcopter. I would be very thankful for the help. Thanks in advance.
I am also posting a video link here for your better understanding. This is not my Quadcopter that I have built but I am facing the same issue and only in windy weather. Thanks again
Please note that this Flight Controler and Firmware release are very old and no longer supported by ArduPilot. We generally suggest to fly on a current supported system , you can consult wiki here: http://ardupilot.org/copter/docs/common-autopilots.html
I know but I have seen many Youtubers having the same APM 2.8 with same firmware but they have High stability in high winds. If you can help me to make my drone more stable then you are most welcome.
These are the log files plz help as soon as possible. The issue is that when I fly my drone near to me means about 100cm from me it flies fine . But when I fly it far away about 50m it wobbles and sometimes flips 180 degree and is out of control and to control it I increase the throttle to 100 percents to have some control on it. Plz help I am in a urgent need.
I have attached two log files plz analyse both of them.
I had a short look at your logs.
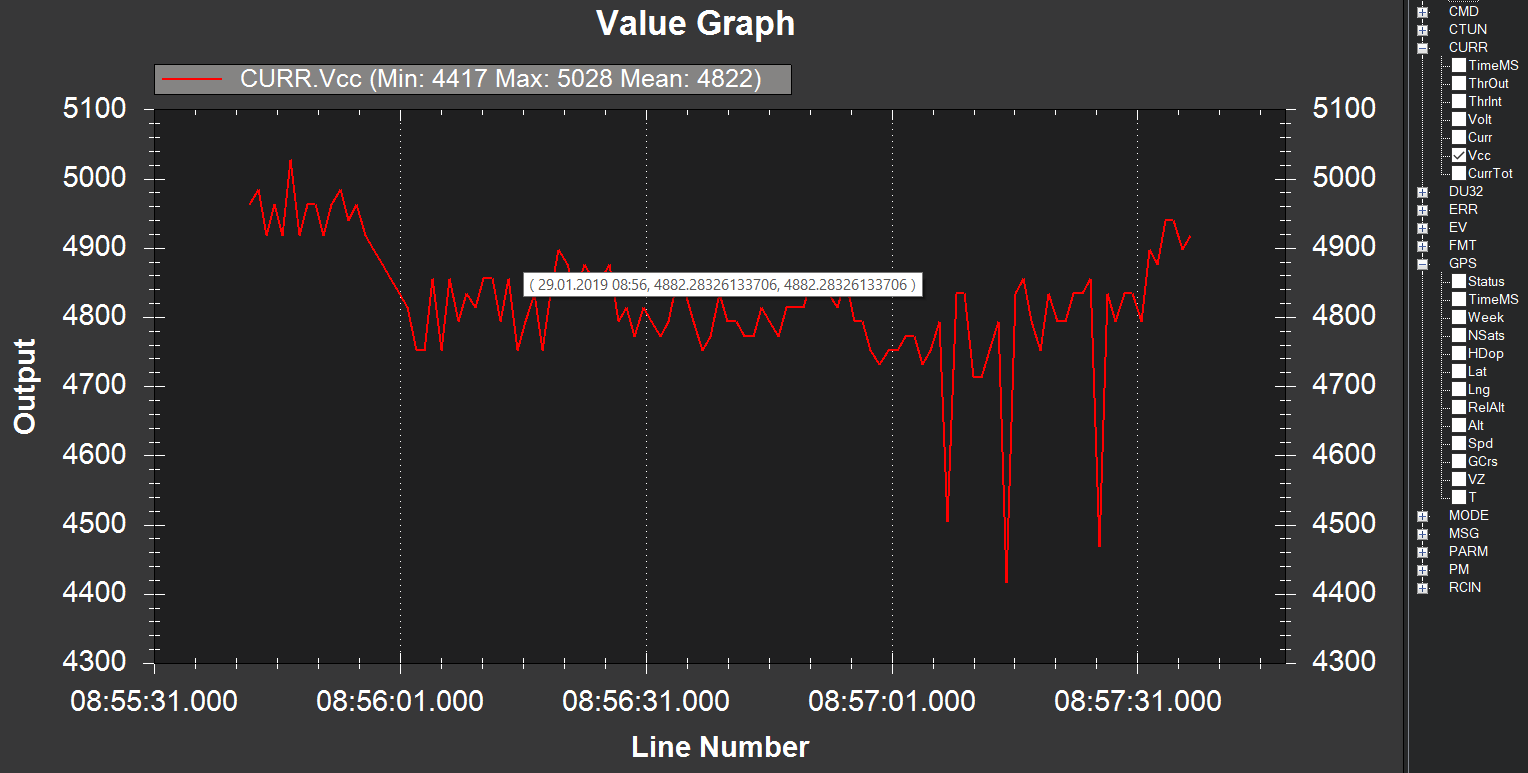
There is no vibration (IMU( or voltage/current (Battery) logging, but I found some disturbing values for VCC (power supply for controller). The voltage dropped from normal 4800mV down to 4417mV during the flight on the 2017-07-12 15-10-53 log, and similar for the 2019-01-29 13-32-09 log.
You may have some problems with your battery or the Power Supply. Most probable a weak battery, as you say it flies fine in calm weather with low throttle
See attatchment…
-Jan
nor is there any vibration data, remember that APM2.x is deprecated long time ago. There is SO much better, market-leading performance in current ArduCopter builds that won’t fit in the flash, RAM or have enough CPU power in those good’n’old Atmega2560 microcontrollers.
I don’t have enough money to buy a new flight controller. If you can help me figure out the problem I would be very grateful to you. Please help I am very worried. Thanks in advance.
Once you have your power supply sorted you will need to do an auto tune.
3.2.1 has good all round PID’s but they can be a bit over sensitive in some setups.
I have one exactly the same here at the moment.
I am just waiting for the Cyclonic winds to pass so I can do an auto tune.
It might be the motors are not powerful enough for the weight of the quad. I don’t know.
Here is a test you can try. On a calm day with zero wind, hover the quad at roughly about eye level off the ground. Keep it exactly steady. Now, look at the throttle setting. It should NOT be over 1/2 throttle.
If it takes more than 1/2 throttle to hover you have a power problem. It could be the battery, choice of motor or prop.
If the throttle is below 1/2 then you have enough power and the problem is something else, PID tunning or something.
I have solved the problem I autotuned the Quadcopter and it worked great and stable. But the sensitivity has increased a lot . If I can fix this then plz reply ! Thanks in advance
I suggest you do a bit more reading first - start with the wiki/docs: Introducing Copter — Copter documentation, and search on the forum.
You’re asking basic questions about how to use ArduPilot that are well documented and have been asked and answered many times before.
As I told you that my problem was solved but actually when I tested again today the problem still exists. I broke my propeller. I can’t understand the reason behind why my drone rear right motors are stopping in mid year and causing a flip. Plz help me if you can. I am really in need of solving the problem as my money is getting wasted in buying the damaged equipment.
Did you increase the number of parameters for logging as asked by a few people trying to help you? Assuming that you did post the log of the last flight that crashed. How are you powering the APM? What battery are you using?
{kind=link}