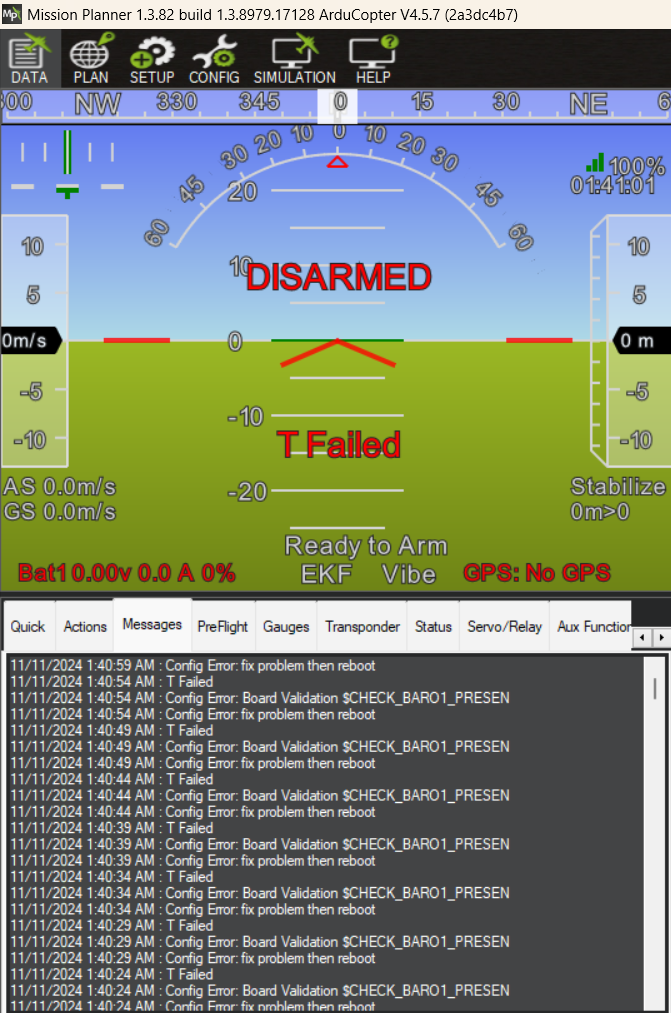
I’m working on a autonomous surface water robot and yesterday itself I bought a new pixhawk 2.4.8. At first on connecting everything seemd fine all the LED’s were blinking as they were supposed to blink and I was also able to connect to the mission planner. But after loading the rover firmware after that the main multicolor LED is not blinking as it was supposed to blink, neither the buzzer is ringing upon connecting and if I’m trying to connect there’s this error in the image below. I’m using windows 11 for it.

If you are sure that you uploaded the right firmware for that board, then most likely it has a faulty baro.
A custom firmware without internal baro may help on it (assuming there are no other defects), or it makes a nice paperweight.
What version of firmware is installed (fmuv2,3 Pixhawk1, 1-1M) on that “wonder” FC. Wonder what hardware it has.
For the rover configuration I installed cubeblack.
I’m sorry I’m a complete beginner in all this can you please explain what actually a baro is and does it has something to do with my flightcontroller?
The firmware of a FC always belongs to the compatible HW. So a wrong firmware assigns the pins and functions of the internal controller in a wrong way and the SW cannot work.
In your case the cubeblack firmware belongs to cubeblack but not to your Pixhawk 2.4.8. Most Pixhawk 2.4.8. are clones similar to the fmu v2 or fmu v3 Hardware. So try to install fmuv2 or fmuv3 Firmware
A “baro” is a barometric sensor. Ardupilot uses this information to calculate the altitude of the drone
Read all necessary information beginnig here:
https://ardupilot.org/rover/docs/rover-introduction.html
I don’t know how you managed that but as @Juergen-Fahlbusch said it’s wrong. Try fmuv3 by going here Fmuv3 and downloading the .apj file. Then use Mission Planners “load custom firmware” to flash it.