My set up:
MP 1.3.7
Rover 4.0
Pixracer with buzzer, no switch
Known good servo and motor
Confirmed 5 VDC on servo output rail.
Armed and calibrated
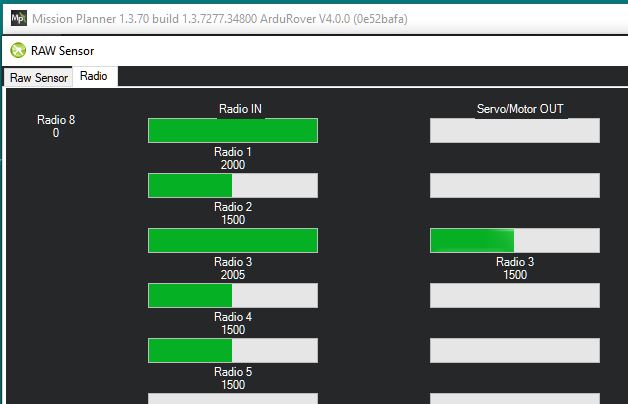
Flight view > actions > raw sensor view > radio:
In this screen, the green bars follow throttle and aileron stick movements. See below:
But in initial setup > mandatory hardware > servo output:
Green bars do NOT follow stick movement. See below:

I do not know why Ch.3 shows a half bar as output. It is static on both screens.
So the big question… How do I get servo output to work?
Any and all help appreciated.