I am completly new to flight controllers and started with a pixhawk 2.1. After connecting the servos to the output ports of the pixhawk 2.1 and going through the setup process in mission planner I was successfully use my radio controlling the servos via MANUAL mode. They react fast as expected. After switching to FBWA mode I realized that the servos react on level changes and radio but for my impression quite slowly. Probably there is a servo reaction on ALL servos at the same time every 0.5 second or even slower. I am concerned that something is not working properly and want to clarify this before I start my maiden with my fixed wing.
Thanks in advance for help!
Best regards from Germany!
Olaf
by default the servo update rte is 50Hz for Plane, (and 200Hz for Quadplane). What you are seeing is probably tuning rather than update rate though. If you are a confident pilot in manual, but not so experienced with ArduPilot, I’d suggest a manual flight to check your trims etc first, and if the aircraft is doing as expected in manual mode, then try FBWA to see if it is controllable (ready to switch back to manual), and then autotune (which is basically FBWA with gain learning), but be ready to take back manual control.
If it isn’t controllable in FWBA, you’ll need to increase the gains manually. Read this first http://ardupilot.org/plane/docs/tuning-quickstart.html and then follow the links to get an understanding of what you need to do.
Thanks James for the information about the update rate and your advise!
Can you further explain to me what you mean with “is probabaly tuning rather than update” ? I am not sure what that means. What is the difference between tuning and updating in this context?
Is there any other way to find out my update rate, for ex. logs ? I know there are logs but can I see the update rate there ?
If I will not find more about it I will of course go your suggested way: MANUAL, FBWA with sufficient height, AUTOTUNE… but I want to avoid avoidable risks
Thanks again for the link!
Olaf
The difference is basically that the servo update rate is how often the flight controller sends signals to the servo, whilst the gains are how fast the autopilot tries to correct errors - so the size of the allowable change between each signal sent.
James, thx again, now I understand.
Can you explain me one more strange thing I recognized please. In FBWA mode it looks to me that every level change results in an additional rudder action and NOT a COUNTERACTION. For ex. when I put the plane nose down by hand I would expect that the FC will put the elevator UP to compensate this as it was not intended by the radio but instead it put down the elevator ^^. Same with the aileron. For my understanding this is not correct or did I miss something ? Any Idea what I did wrong ?
Following additional information:
artifical horizont in missionplanner works correct (so I guess the sensors working fine)
as I said before, in MANUAL mode every servo reacts as expected
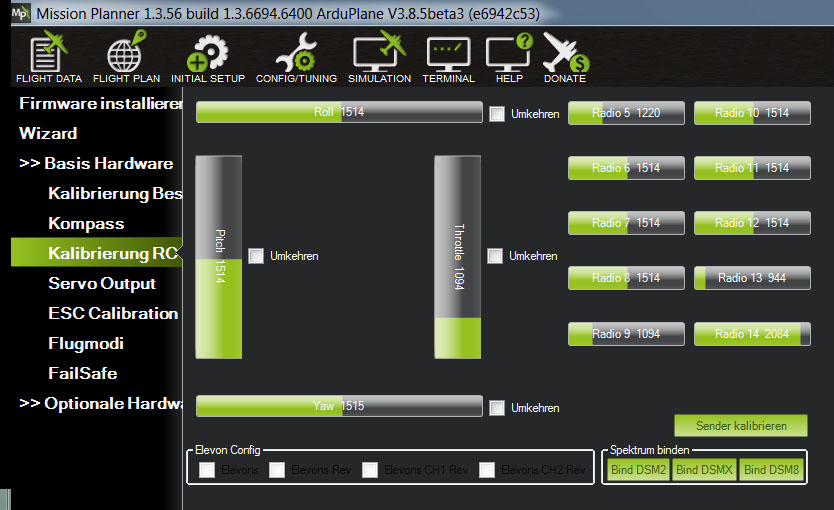
Naterater thanks for the answer. I was confused about the fact that I can reverse servos on 3 different places, in the RC, in Mission planner “RC calibration” and mission planner “servo output”. At least for me it helped to turn of any reverse in RC and RC calibration und just did it in the servo out where necesarry.
@ james
Meanwhile I found out what the problem was.
In my room there is a 2,4 Ghz router and I used analog servos. It looks like there was a strong interferance. As I went outside it was gone.
Just answering as others might have this issue too.