During a recent test with Pixhawk 2, Arducopter 3.4.4 and a 500-size heli frame, I noticed that the copter tended to roll right quite significantly during takeoff, so the takeoff was aborted.
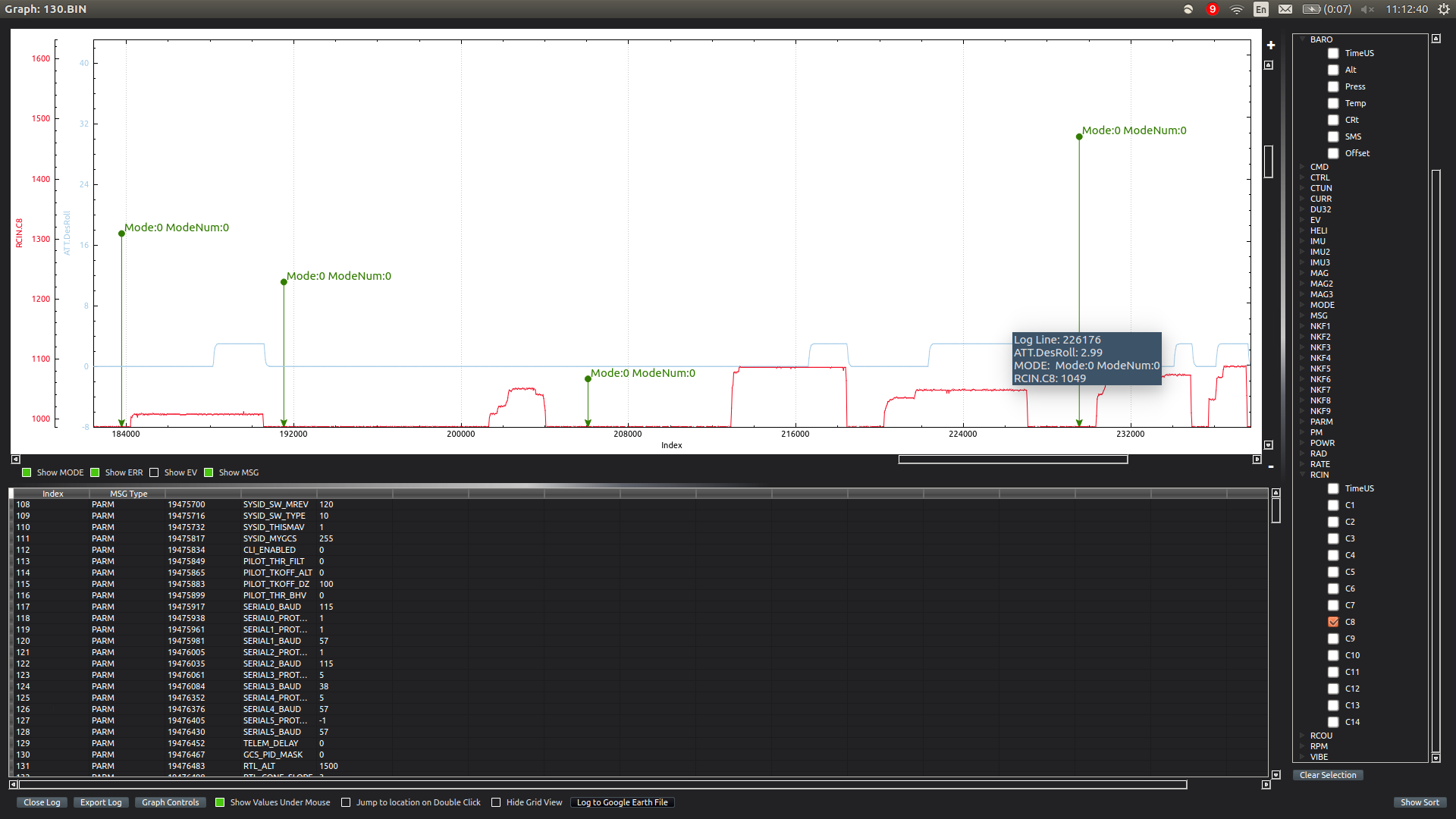
I realized that the Desired Roll (ATT-DesRoll) was about 3 degrees after arming the copter and increasing throttle instead of zero.
Is this intended behavior to compensate for translational tendency or similar effects?
In case it’s hard to see, the blue line refers to the desired roll, which I expected to be zero, but its increase corresponds with arming and an increase in channel 8 throttle.
Ah!!! Your EKF is blowing up (errors/ clipping) due very high vibration levels. Your new vibration damping mount is making things even worse than before. Can you post a picture of it?
Can I ask, how much RC heli experience you have?
I don’t have any electric helicopters experience and have never set one up. All my experience is with petrol powered heli’s. I’m am reluctant to share my param file as it is different to your electric helicopter and may confuse things. Maybe somebody else can chip in and help!
Couple of things I’ve noticed on you log file after a quick look.
1, It seems you have you throttle/ESC on the collective channel (ch3) and Collective on throttle (ch8). They need swapping.
2, I can’t work out what is going on but you have some kind of wired behaviour going on with the input of RCin ch3 and output on all RCout Ch1,2,3
3, Your tail linkage/geometry seems wrong as you are only using a small range of 700 to 1200. It needs to be around 1000 to 2000. It will make tunning the tail a lot easier.
4, The PID’s, Your I’s and D’s look high for a first test flights. Here is a param file to give you an idea of where to start. This is for a 600 electric heli I found on the net. Use with caution! Trex600 3.2.txt (7.5 KB)
After you have fixed these thing, can you retry this test learning?
Test leaning the helicopter in Stabilise mode
• By hand, roll the helicopter to the left. The swash plate should lean to the right.
• Roll the helicopter to the right. The swash plate should lean to the left.
• Pitch the helicopter down (i.e. nose down). The swash plate should lean backwards.
• Pitch the helicopter up (i.e. nose up). The swash plate should lean forwards.
• Rotate the helicopter quickly clockwise - the tail servo should move as if you had pushed the rudder control left (i.e. it’s should try to fight against the rotation)
• Rotate the helicopter quickly counter-clockwise - the tail servo should move as if you had pushed the rudder control right (i.e. it’s should try to fight against the rotation)
• Next rotate the helicopter slowly. You should find that in a certain direction the rudder stays in the middle. This is the APM trying to hold that heading.
Test the transmitter in Stabilise mode
• Using the transmitter, move the roll stick to the left. The swashplate should lean slightly to the left.
• move the roll stick to the right. The swashplate should lean slightly to the right.
• Move the pitch stick forward. The swashplate should lean slightly forward.
• Move the pitch stick back. The swashplate should lean slightly backwards.
• Move the yaw stick to the left or right. The tail should move in the same direction (and about the same amount) as when you are in manual mode.
I haven’t looked at your log file but I can answer your question. Yes the software sets the desired roll angle in stabilize mode to offset the lateral acceleration imposed by the tailrotor thrust. The roll angle is set by the ATC_HOVR_ROL_TRM parameter in centidegrees which is defaulted to 300. Once you get flying, you may need to adjust this slightly if you see the aircraft translating left or right with your stick centered.
Thank you very much @bnsgeyer , this was exactly what I was looking for.
@Steve_Mitchell, thanks for your response, regarding your questions:
Yes the previous mount was pretty terrible, just used basic foam that came with the Pixhawk 2 and mounting that more or less onto the heli frame - we’ve changed it now and I think we’re seeing better results.
My team and I are quite new to RC helis, but we’ve been working with the Pixhawk/Ardupilot ecosystem for a while, the community has always been great
The ESC is definitely on channel 8 and the collective is definitely on channel 3, i’m not sure why you’re saying it’s swapped.
Input on RCIN 3 (collective) will raise all swash servos on RCOUT 1,2,3, I don’t see this as unexpected behaviour.
The servo range I’m using is based on the max range provided to me by the Goblin 500 setup - we didn’t deviate at all from the manufacturer’s setup in this regard - same servos, same linkage, and the motion seems alright. I’m not sure what action I can take here to change this.
Hm yes the PID values we’re using are probably not all that correct - we are using the default PID values at the moment. Thanks for the parameter list, I’ll try with PID values in that range.
With both manual motion and stick motion, the swashplate is moving in the directions specified - this is also part of our pre-flight checklist.
Great advice, to correct a roll tendency in the hover! I’m currently setting up my first attempt to equip a Blade Fusion 360 with arducopter, and over 30 seconds it tries to roll quite significantly (requiring almost full left aileron by that time). ATC_HOVR_ROL_TRM had been set to the default of 300, and this was too high (225 was the more appropriate setting). This advice really helped sort it out, thanks!
in Accelerometer calibration.
after Calibrate Accel with FC squared (leveled) .
I did Calibrate Level with the helicopter tilted to (what I estimated to be just with my eyes) it’s hovering angle.
and it is now hovering ok in one place.
not sure if this is a proper way of doing things, but for now, I can do basic movement with the heli.
 All my experience is with petrol powered heli’s. I’m am reluctant to share my param file as it is different to your electric helicopter and may confuse things. Maybe somebody else can chip in and help!
All my experience is with petrol powered heli’s. I’m am reluctant to share my param file as it is different to your electric helicopter and may confuse things. Maybe somebody else can chip in and help!