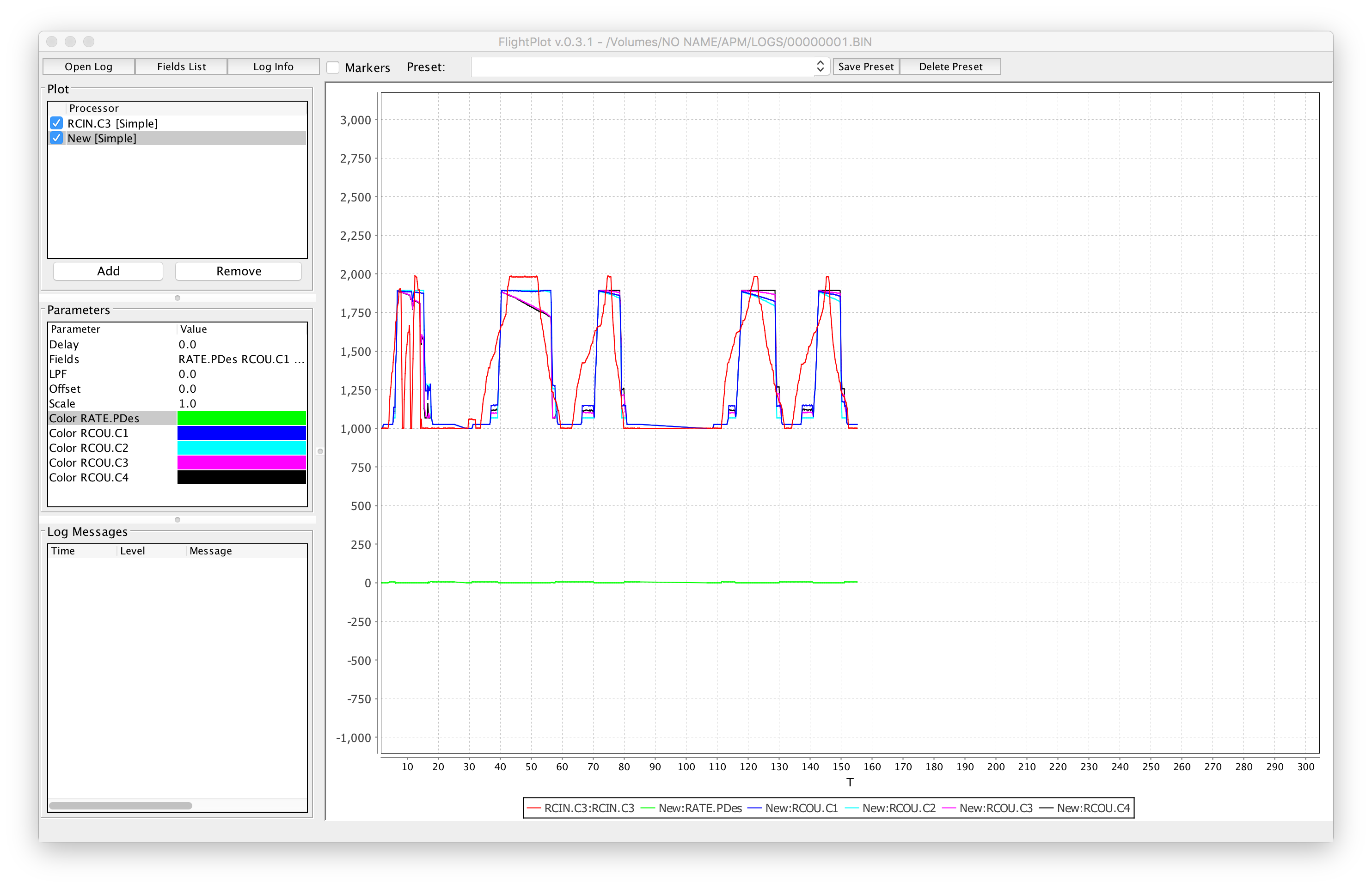
Hi all! I’m trying to run my copter(pix4 2.4.8 with APM 3.5.5) in stabilize mode. But when I want to take off, I find my motors spin speed does not follow my Throttle and seem to have discreet values like this:
Stabilize mode works to level the craft with no stick inputs. Therefore the motor speeds will vary as the autopilot attempts to achieve desired attitude. If you post the complete data flash log there may be something else going on.