Had a first few flights today with v2.78 on my own plane and I’ve noticed that certain items appear very “noisy” on the log - relative alt, pitch, nav_pitch and throttle for example. The motor was also ‘hunting’ up-and-down badly until I set the throttle slewrate but on other airframes this “noise” isn’t there and certainly the throttle doesn’t ‘hunt’.
Is this normal or something peculiar to APM1, my setup or my airframe? (Note, it has done this before so I don’t think it’s v2.78 specific.)
[quote=“Graham Dyer”]Had a first few flights today with v2.78 on my own plane and I’ve noticed that certain items appear very “noisy” on the log - relative alt, pitch, nav_pitch and throttle for example. The motor was also ‘hunting’ up-and-down badly until I set the throttle slewrate but on other airframes this “noise” isn’t there and certainly the throttle doesn’t ‘hunt’.
[/quote]
Hi Graham,
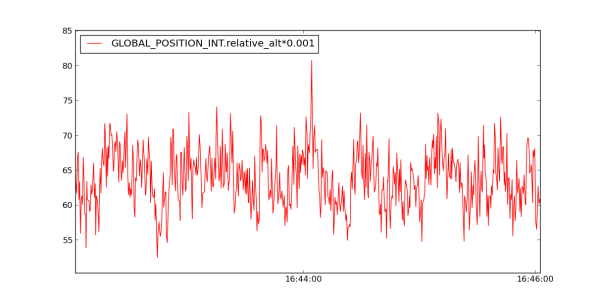
The one that is most peculiar is the relative altitude, which comes straight from the barometer. That is much noisier than usual:
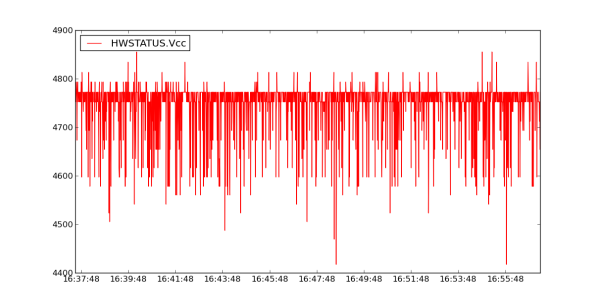
One possible explanation is the power supply to the APM1. This is a graph of HWSTATUS.Vcc, which is the voltage on the 5V rail:
Both APM1 and APM2 are sensitive to changes in voltage, but the APM1 is even more sensitive as it uses gyros and accelerometers that come in via an analog to digital converter that is sensitive to voltage changes.
I can’t be sure that the voltages fluctuations do explain the results on your APM1, but they are certainly worth fixing.
Cheers, Tridge
[quote=“Graham Dyer”]Not sure what the noise can be, my 5v is supplied by a UBEC and the voltage looks pretty clean on a scope.
But even with a 5V battery the HW voltage still fluctuates by about +/-0.2V[/quote]
Do you have any peripherals on the APM1 which could be drawing enough current to cause the voltage to drop? For example a high power radio?
Maybe watch the HWSTATUS.Vcc in MissionPlanner live view and then detach devices one by one and see if any of them are the cause.
Also check all of the connections to make sure none of them are high resistance (including ground).
Cheers, Tridge
[quote=“Graham Dyer”]On USB it reports 4.65V, 4.72V without GPS and 4.78V without telemetry radio, same without airspeed sensor, this is all without any servo’s attached.
[/quote]
sorry I didn’t explain carefully enough. The absolute voltages aren’t really critical, it is the noise that matters. So what I meant if for you to do live graphs of the voltage with each device attached/detached and see if you can find the one that causes the most noise.
Cheers, Tridge
That’s what I thought it would be. Telemetry radios by their nature have quite a bursty demand on power. They demand quite a bit of current when transmitting, then almost none when idle.
The usual solution is to make sure that the DC-DC converter (eg. the UBEC) has enough spare capacity that when the radio demands some power for a millisecond or so that the voltage doesn’t change too much.
How are you powering the APM1? What is the current limit on that supply?
Cheers, Tridge
I’m using a 5A Turnigy UBEC.
The radio was not connected to another at the time I did that check, it was just on. Connecting an RCTimer radio showed very little noise, so I suspect it’s the radio itself rather than the volt drop caused by the radio.