Hello community, we are using cube orange with Airspeed sensor Matek DLVR (L431) sensor which is using CAN port to communicate with cube orange.
we are using arduplane 4.3.0 firmware.
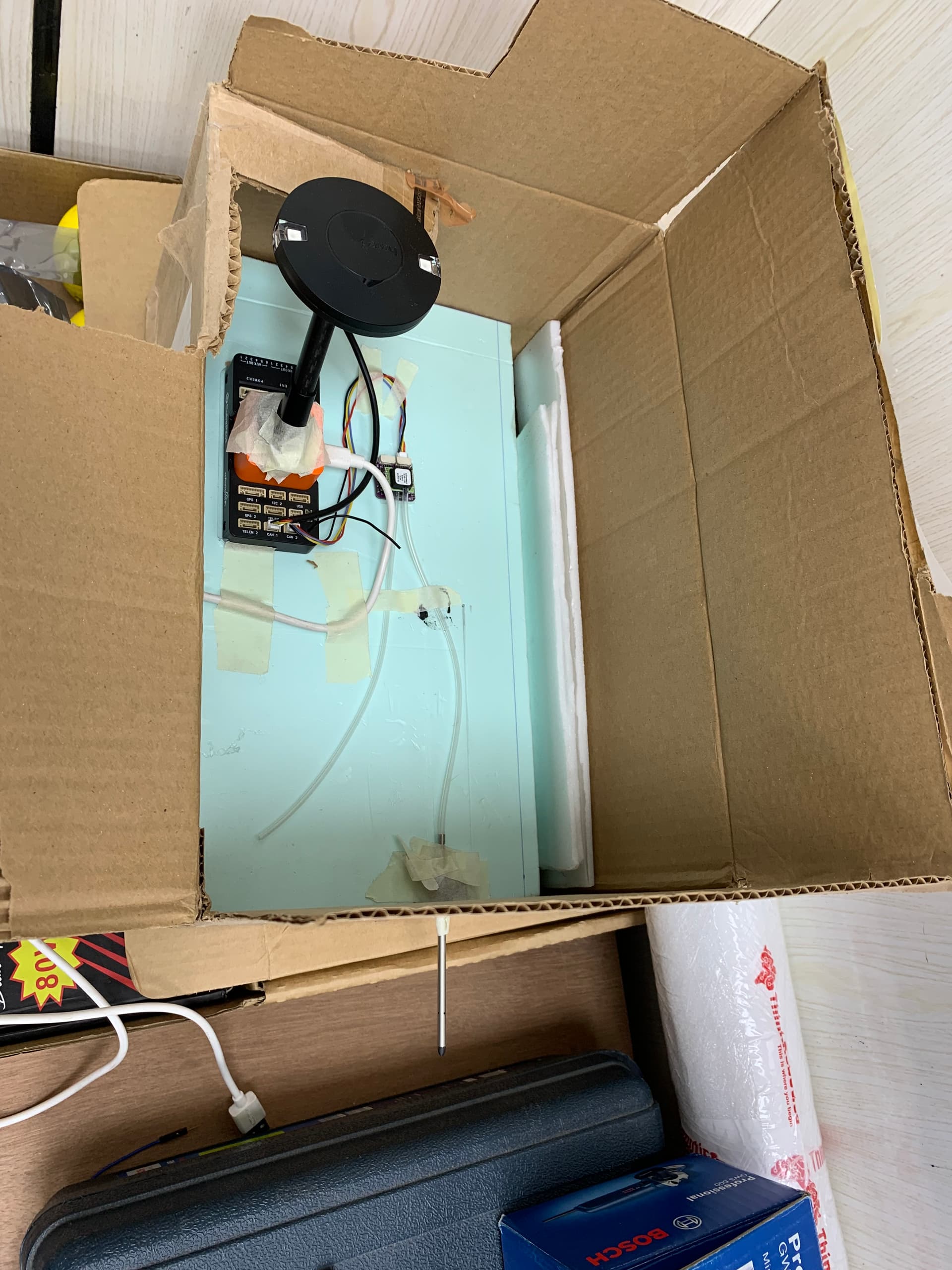
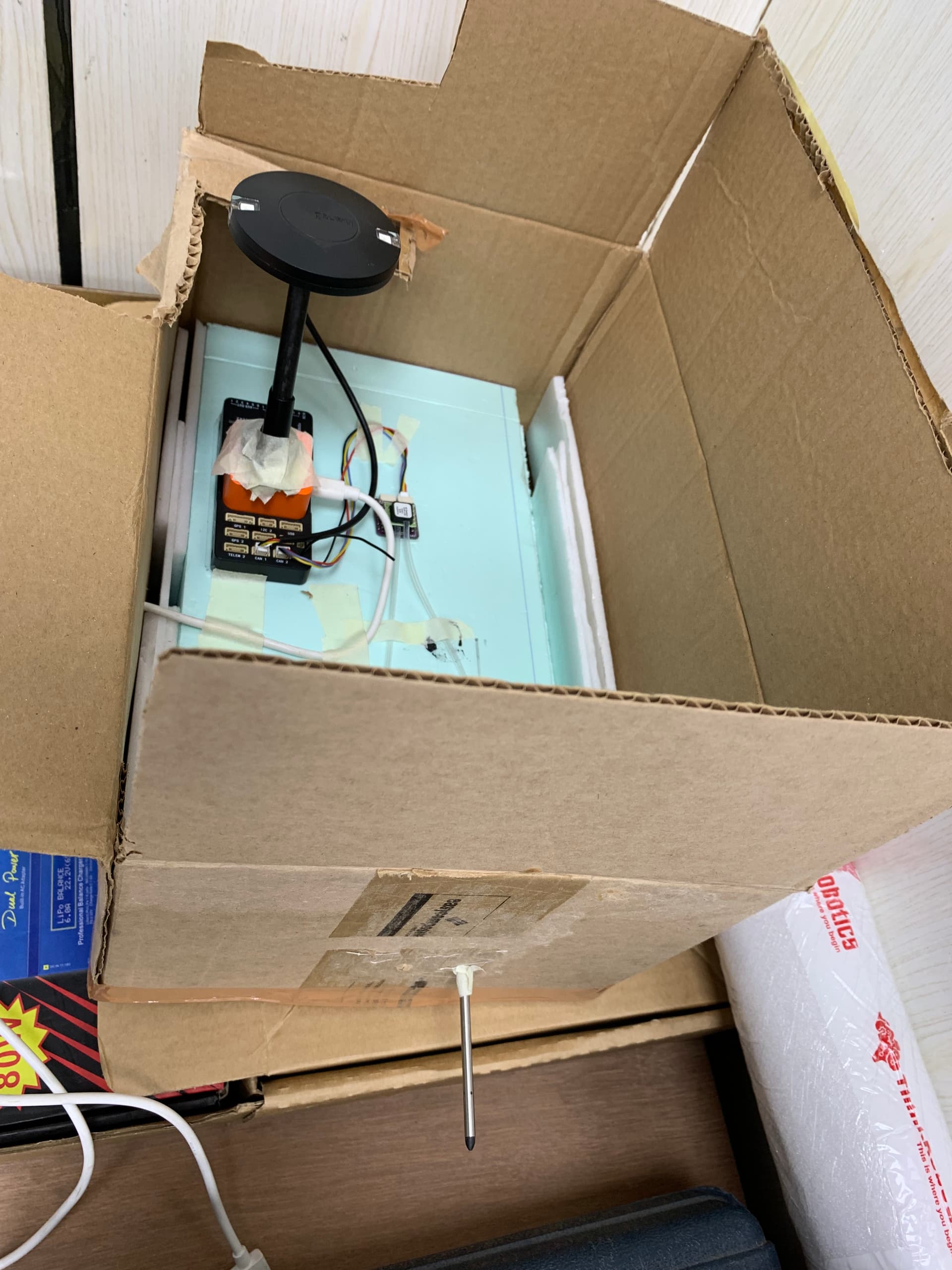
So to validate the airspeed sensor, we did a set up with here3 GPS, Cube and Airspeed sensor something like the below image and then we went in a car and took the airspeed sensor outside, from the passenger seat, we considered the aerodynamics of car and held it accordingly.

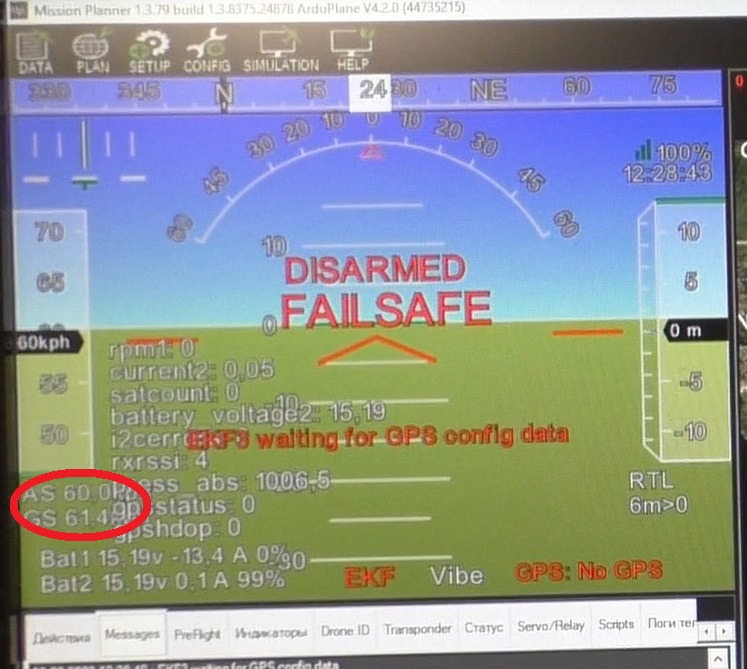
We did the pre flight calibration according to the ardupilot documentation by covering the pitot tubes. The pitot tube was firmly attached and pitot tubes were connected to airspeed sensor according to the documentation. we were able to get the good ground-speed data based on the GPS but there were lots of noise in the airspeed data as you can see in the below image. I have also attached the logs if you want to look into that file.
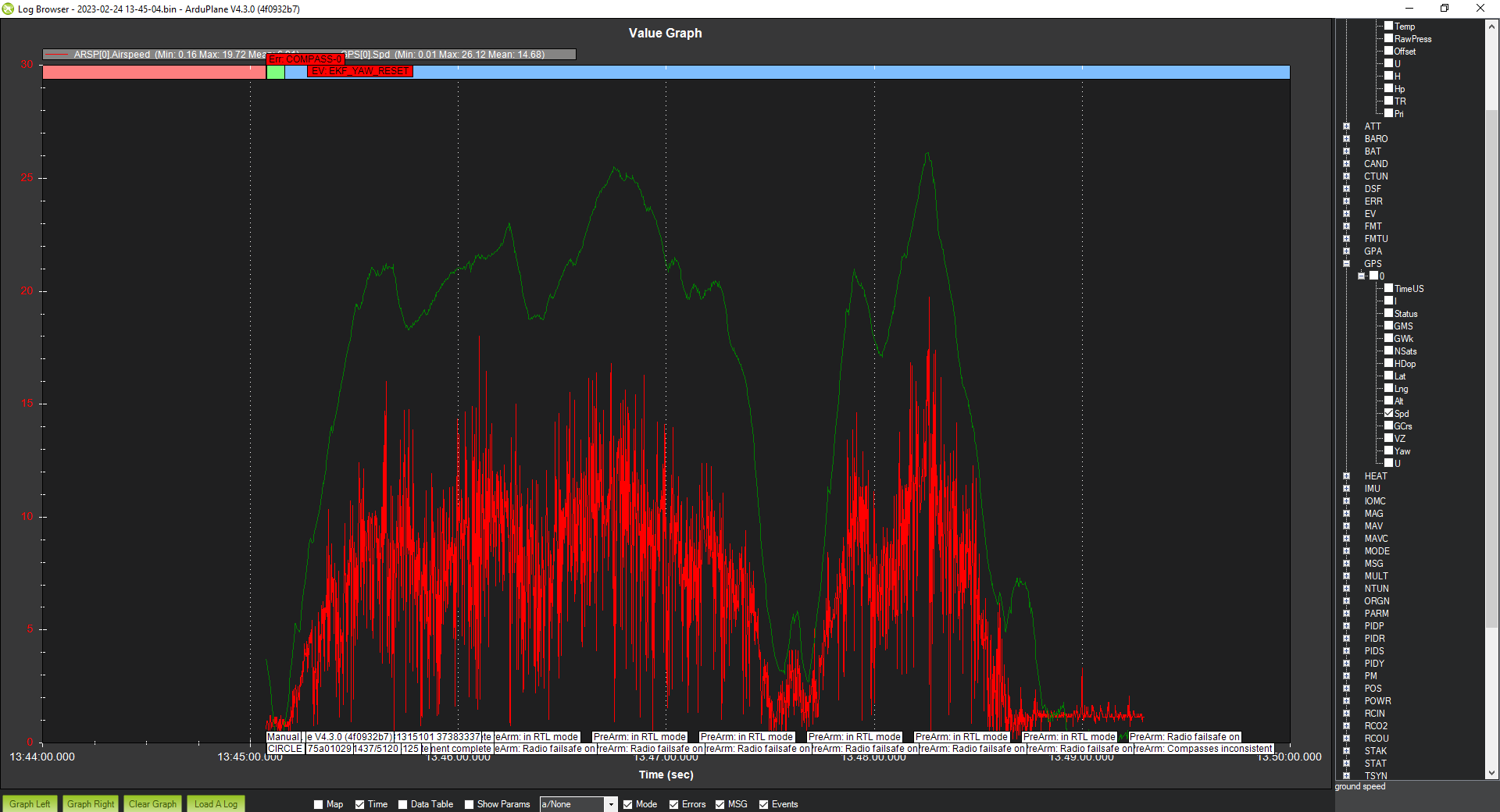
Logs - https://drive.google.com/file/d/1pMyD_OcPW582fjaN-YMKEEDztR1BQYWW/view?usp=sharing
If you have any suggestions please help. Thanks in advance!