I’ve been following @amilcarlucas’s Methodic Configurator guide, but I’m encountering an issue during the notch filter calibration process. When I upload the BIN file to the filter review tool, I get the following message:
No tracking data available for Throttle Notch
I’ve searched the forum and found similar issues, but none of the suggested solutions have worked for me so far.
My Setup:
RC: Herelink
FC: Cube Orange Plus
ESC: Hobbywing XRotor 20A (Without ESC telemetry)
Log Bitmask: 2766812 (I’ve also included Raw IMU)
INS_LOG_BAT_OPT: 4
INS_HNTCH_MODE: 1 (Throttle-based)
Since I don’t have ESC telemetry, I set INS_HNTCH_REF equal to MOT_THST_HOVER.
I initially attempted to configure the throttle-based notch filter directly, but after encountering the tracking issue, I tried running FFT. However, when I uploaded the BIN file (081) for the FFT, I received the below message:
No tracking data available for FFT Notch
Here are the log files:
I plan to complete the FFT setup first and, based on the resulting values, configure the throttle-based notch filter afterward. However, I seem to be missing something critical in the setup, and I can’t figure out what it is.
If anyone could review my setup or suggest what might be causing this issue, I’d greatly appreciate it!
You need at least medium attitude logging too, which would be LOG_BITMASK,2766814
assuming you need that additional fast logging you have set. Usually the extra logging just confuses everything and created huge logs unless you know you need it and know how to use it.
I usually use 180222 for logging and that’s all you need unless you are going to require the fast logging for something particular.
Alter these for the harmonic notch filter as a starting point.
Decimal places in the frequency wont make any difference, and a REF value higher than hover thrust means the notch filter will do nothing.
There’s a formula for calculating the REF when using throttle-based notch: INS_HNTCH_REF = hover_thrust * SQRT(min_freq / hover_freq)
which works out to be approximately: INS_HNTCH_REF = hover_thrust * 0.6 or 0.7
Dont worry about setting up the live FFT - it’s great for finding out the filter values to use for throttle-based notch when you dont have any other mehod, but it requires a lot of messing around to get it working correctly. It could potentially be useful if you had a payload that varied weight during flight, or vibrations changed for some reason (spinning LIDAR on/off maybe?) but otherwise throttle-based notch filter will work well when configured via logged data and the offline web tool.
I’ll think about that. I normally just use 180222 and almost never go for the extra fast logging options. Maybe I could benefit from that too.
I’ll have to look at where this is in the M.C. too → which steps are requiring the extra logging, and possibly when it can be set back to normal.
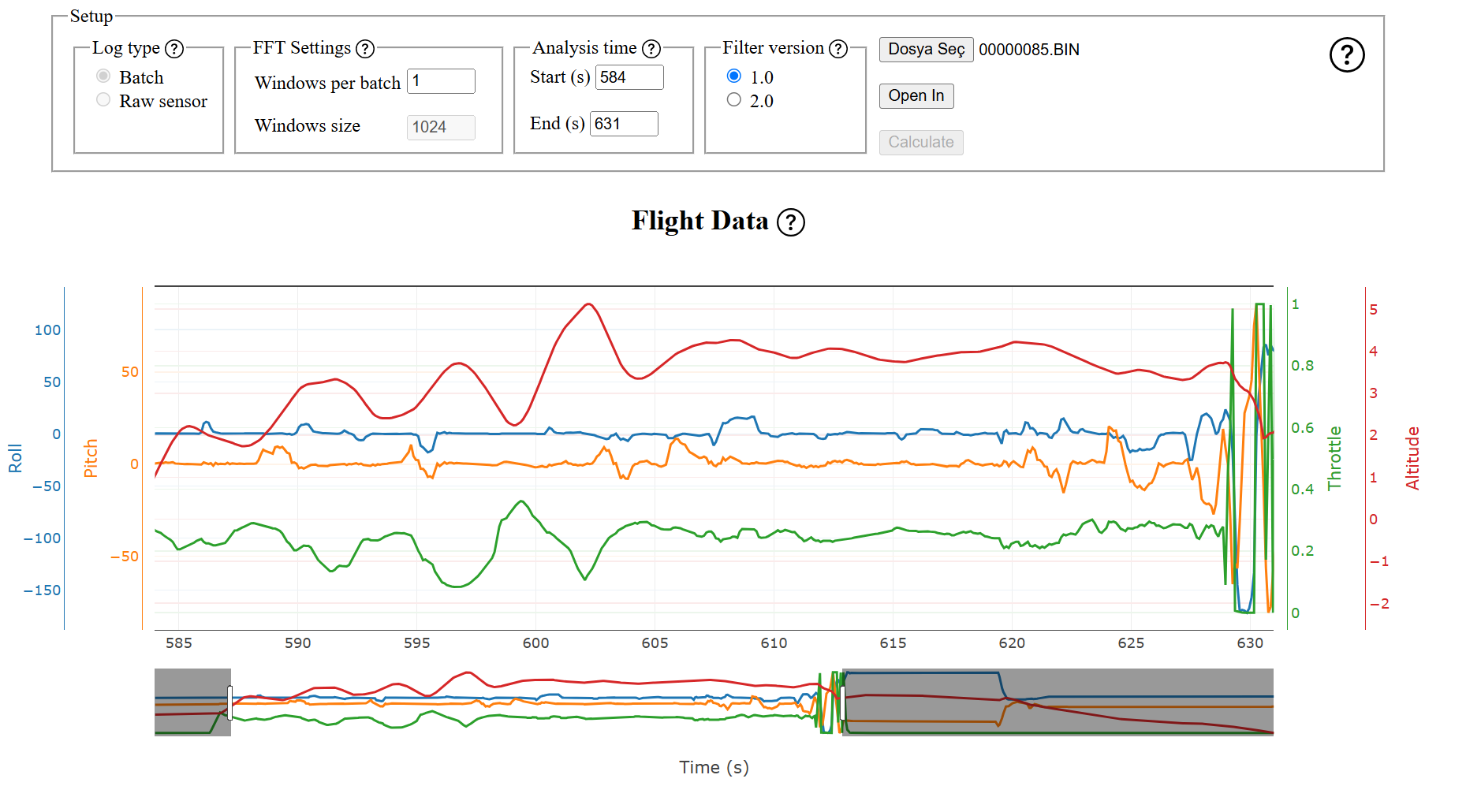
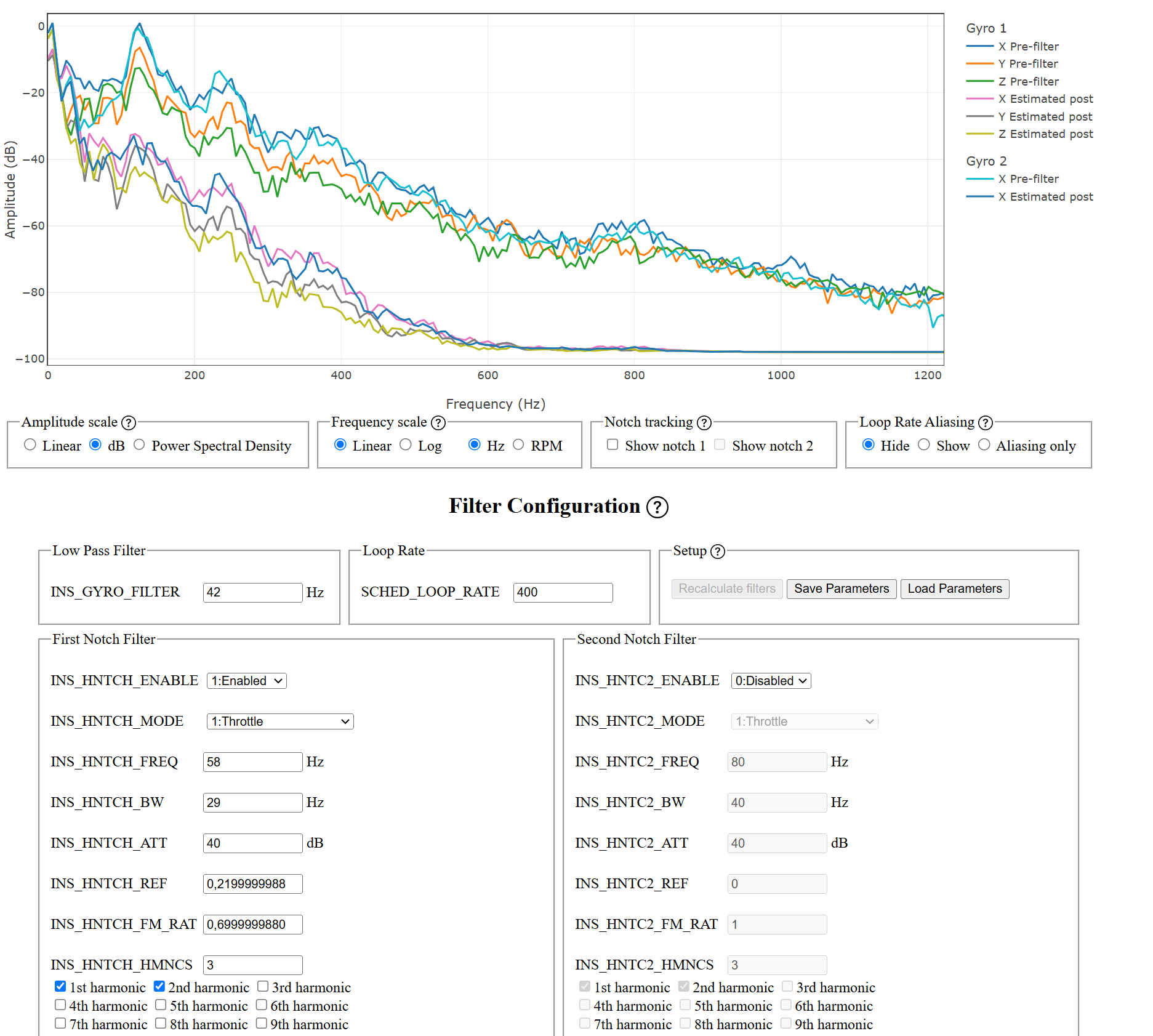
Hey @xfacta Just done with the flight. These parameters made the control worse and I had a little crash. But on the bright side, the test was ok. pictures of the filter tool and bin file are below.
There’s quite a mess of noise at low frequencies. I think control will be much better when we can refine the notch filter.
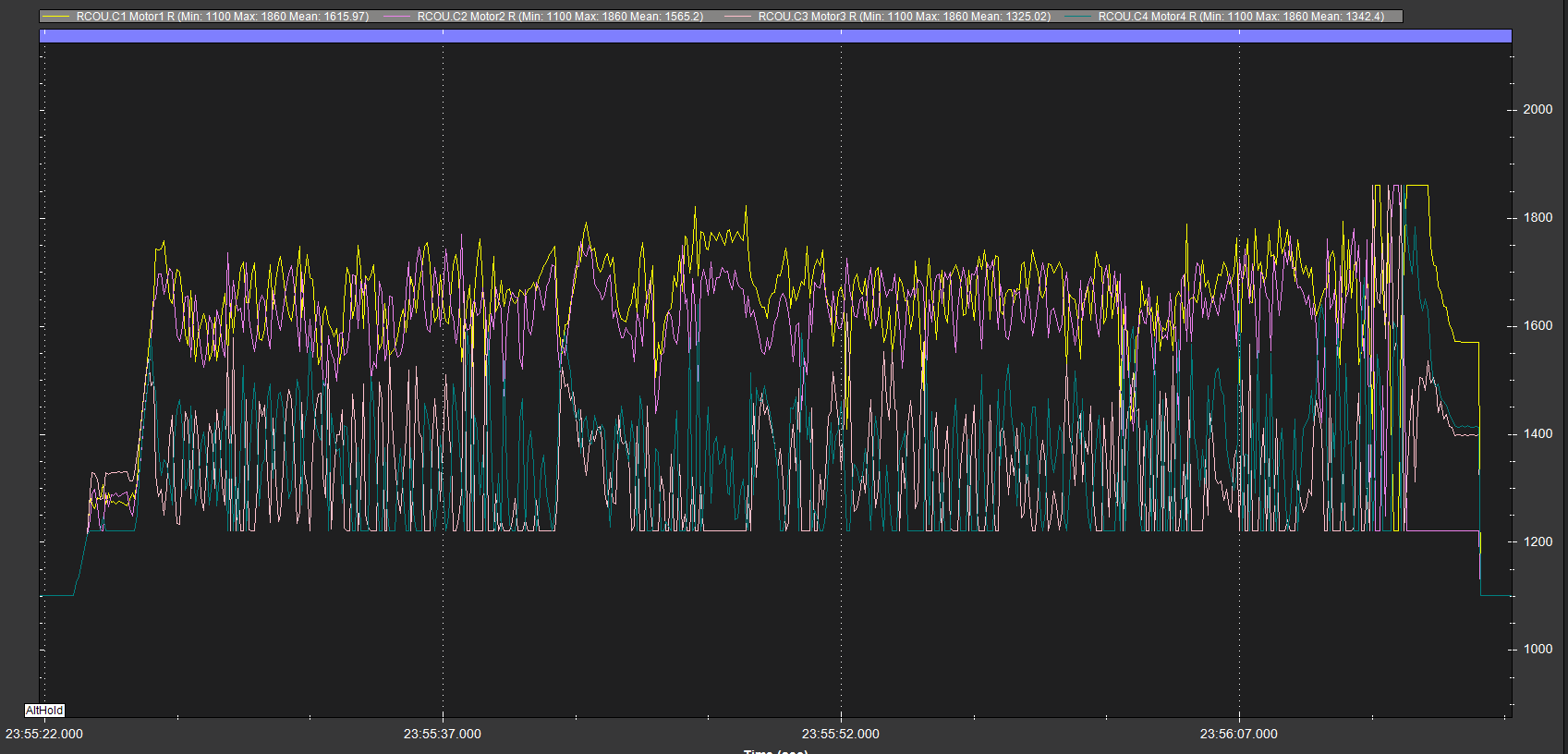
The cause of the mess of noise is the motors and some frame or motor mount twist. In this graph you can see CCW motors (1 and 2) are working harder, and CW motors (3 and 4) are hitting minimums just about all the time.
Those motors hitting minimums do drastically effect stability, plus that physical yaw bias (twisted motor mounts) wont be helping yaw. Very closely inspect the alignment of all the motors and props, so they spin in the same plane.
At the moment just temporarily set these for the harmonic notch filter, just until we get another good flight.
Thank you for taking the time to inspect the issue. This is an edu450 frame, and as you suspected, the motor and arm fixings are not of the best quality. I will make some improvements to the frame to enhance its rigidity and then adjust the parameters as per your suggestions.
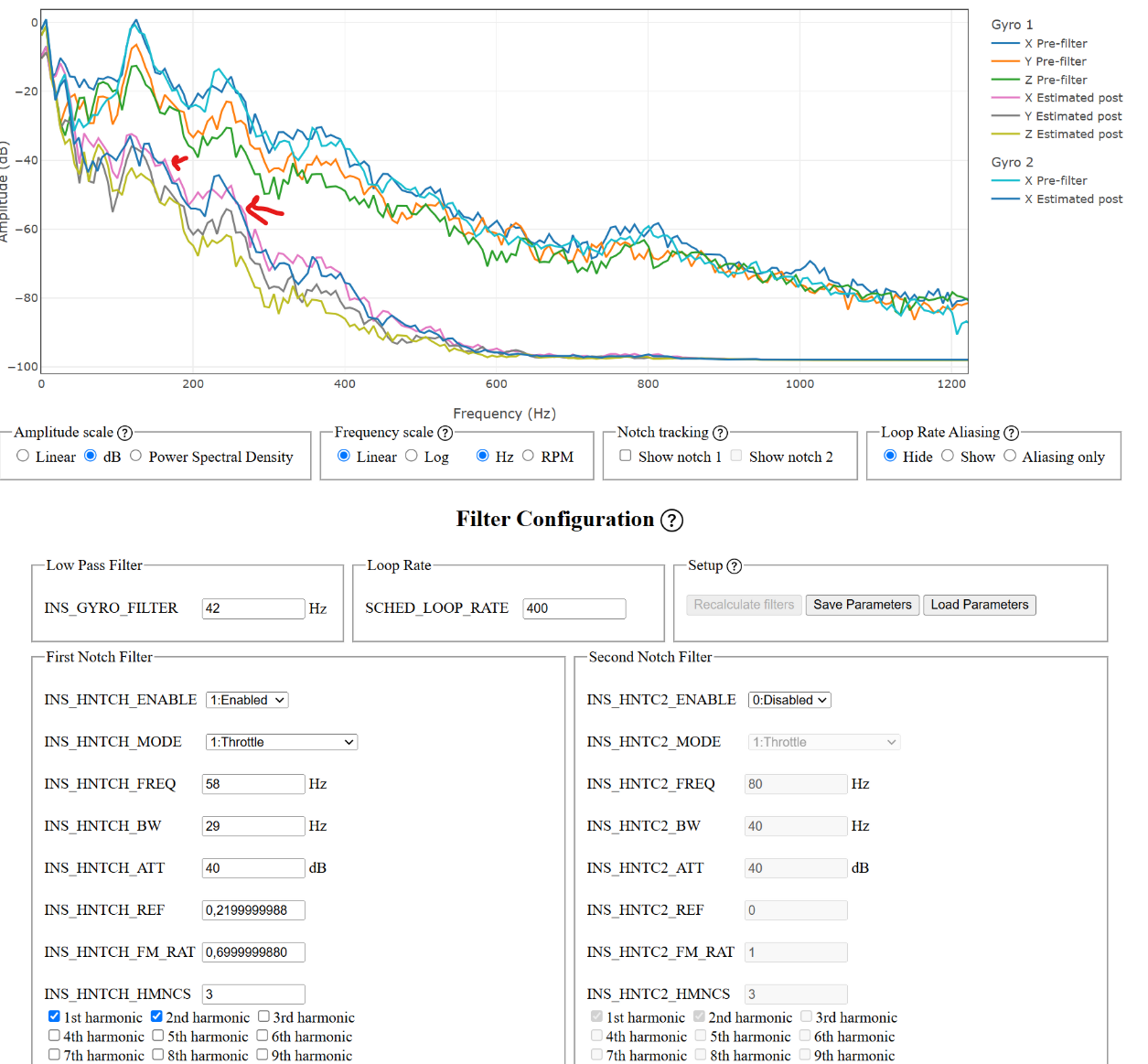
To better understand the tuning process, I have a question:
From what I’ve gathered, I should adjust the parameters to reduce the peaks (shown in the graph) and aim for a more uniform frequency response. Is that correct? If so, is there a specific dB value or threshold I should aim to achieve during this process?
My plan is to fix the frame to improve its quality and rigidity, conduct a new flight with the improved setup, and fine-tune the parameters for better performance.
I also have a gyro test rig that I use for motor/compass calibration and basic PID tuning. While I understand that it wouldn’t exactly replicate the conditions of a free Alt Hold flight, do you think this rig could be used effectively for the notch filter calibration process?