Hello,
I am experiencing some difficulties with the throttle not working in all modes other than manual mode. The throttle is being read properly by the transmitter’s input (Taranis X9). However, the servo output for the throttle is not responsive in any of the modes other than manual.
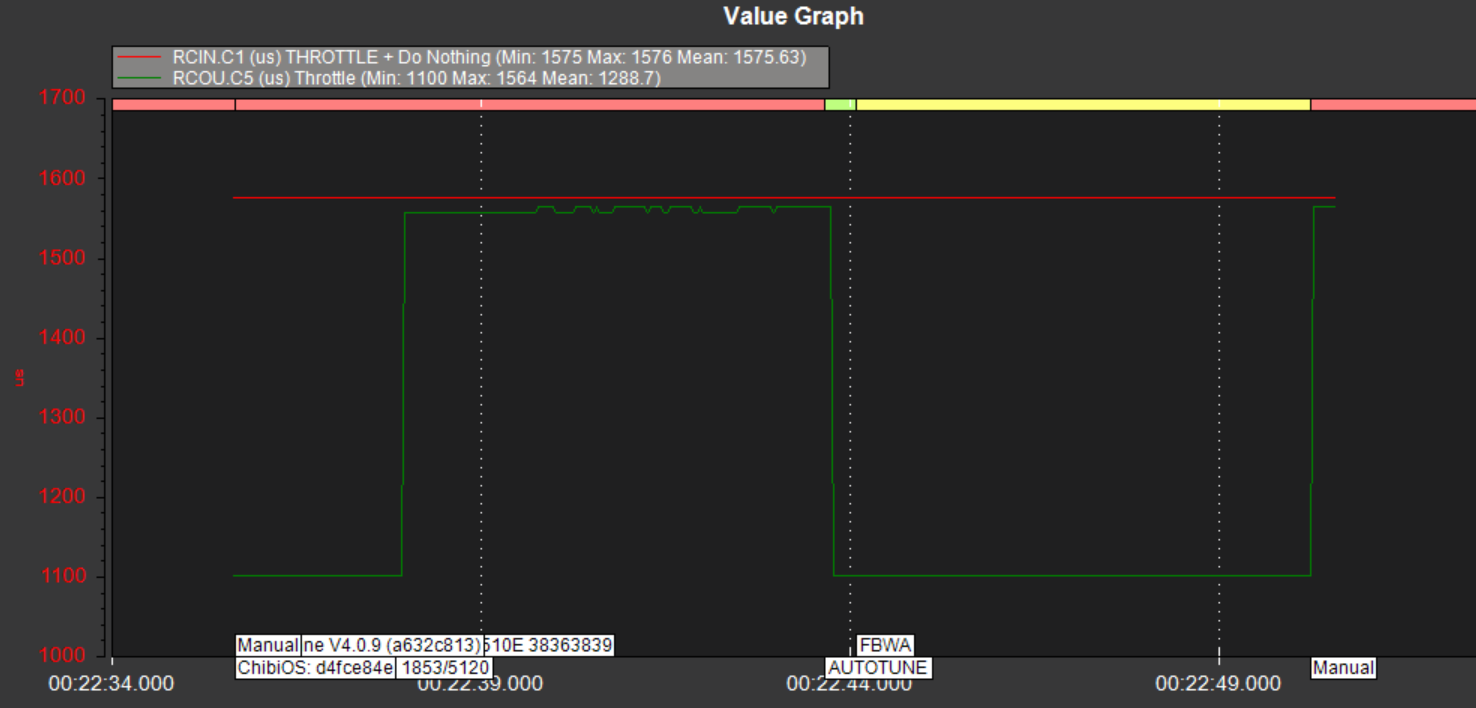
I have attached the parameter file and the log file to this post. The log file shows the throttle output (servo 5 on the main rail, RCOUT5 log param) goes immediately to 0 once I enter FBWA and goes back to the expected value once I return to manual mode.
Let me know if you require any logs or other files to help troubleshoot.
new_list.param (19.1 KB)
2 1969-12-31 7-00-00 PM.bin (592.0 KB)
Looks like you have SERVO5_FUNCTION set to throttle, with servos 1 and 4 set to elevon left and right. That seems correct to me.
Did you arm the plane? ARMING_RUDDER is set to 0, and you have no RCx_OPTION set to 153 to enable arming via a switch. Looking at your logs, STAT.Armed is zero during the entire log.
Hi Chris,
I have armed it from the mission planner actions list

The issue seems to be that there is no output throttle in manual mode as seen in this picture.
Do you have any idea what might be causing this?
Thanks!
Are you sure it armed successfully? If it did, then I’m not sure what’s going on.
Issue resolved:
I had the safety on…being in the safety state prevents any flight mode from actually flying.
BRD_SAFETY_ENABLE to 0
BRD_SAFETY_MASK = 0 (since I wont be using a safety switch)
THR_PASS_STAB =0
Having applied the following changed to the params, throttle works fine now
Thanks once again Chris!
1 Like
hello, I have a problem. My plane is a tricopter plane with 2 front tilt servos. When I use QSTABILIZE mode, the throttle can be maximum and can lift the plane. whereas when changing to FBWA plane throttle motor mode it feels like there is a limit and it can’t be maximized, is there a solution so that the throttle in QSTABILIZE and FBWA modes can be the same maximum?