I did several RTL test with different LAND_ALT_LOW (500-800) in the hope my copter will slow down and switch to LAND_SPEED (50), but instead I have to recover it by switching to Loiter so it will not crash into the ground. In past firmware I could decent quick and switch to LAND_SPEED at 2-3m above ground. If I look at the logs the baro estimates the height correctly as far as I understand. I have attache below one log where I tried twice RTL at the beginning. If someone could point me in the right direction would very much be appreciate.
Thanks
https://www.swisstransfer.com/d/f6d80866-f656-4db2-8a11-024fe1d7af81
I think the problem is LAND_SPEED_HIGH is too high, however 600 was achievable according to your log, but the descent rate only slowed to about 260 (or 240).
I would try lowering the LAND_SPEED_HIGH value to say 200, then try some landings (using Land mode) and see what happens at the altitude where the copter should switch to LAND_SPEED.
Increase the LAND_SPEED_HIGH by 100 for each test and report back your findings.
I’ll see if I can find an issue with the code for RTL or Land modes when LAND_SPEED_HIGH is over the recommended maximum of 500.
Your WPNAV values might have similar issues with unrealistic or unachievable values - or not. Just pointing it out in case you notice other problems.
Thanks for your fast response
What I tried:
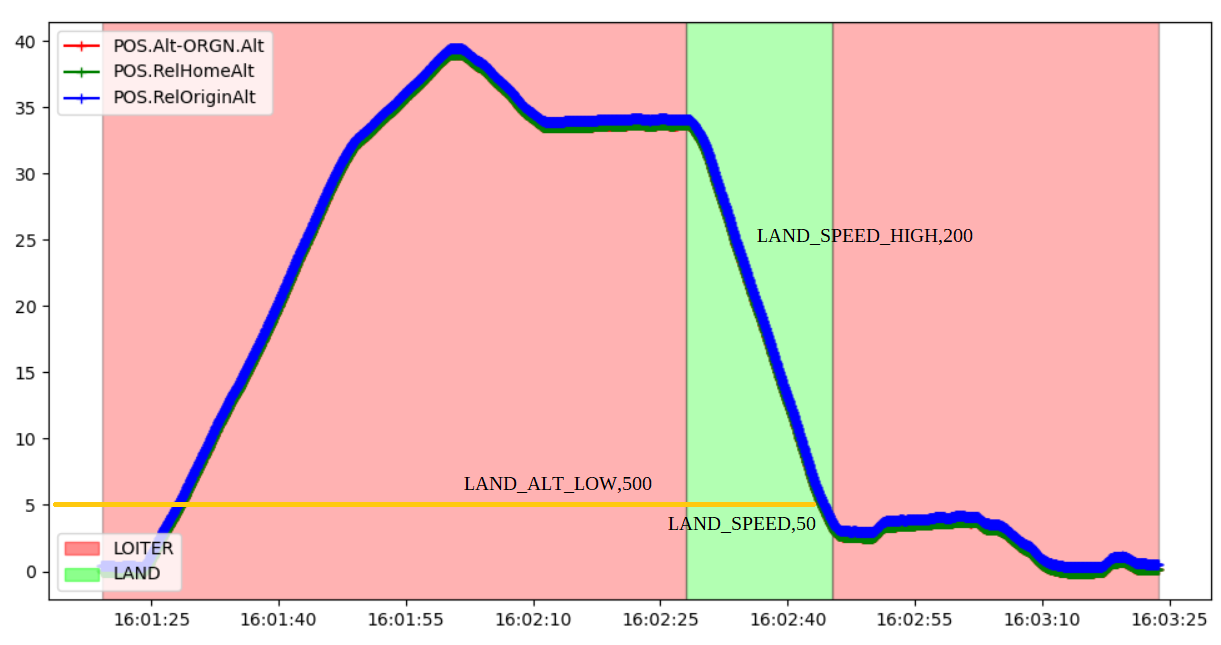
LAND_ALT_LOW,500 / Land_SPEED_HIGH,200 → take over by Loiter (see graph)
LAND_ALT_LOW,800 / Land_SPEED_HIGH,200 → take over by Loiter
LAND_ALT_LOW,1000 / Land_SPEED_HIGH,200-400 → successful Land
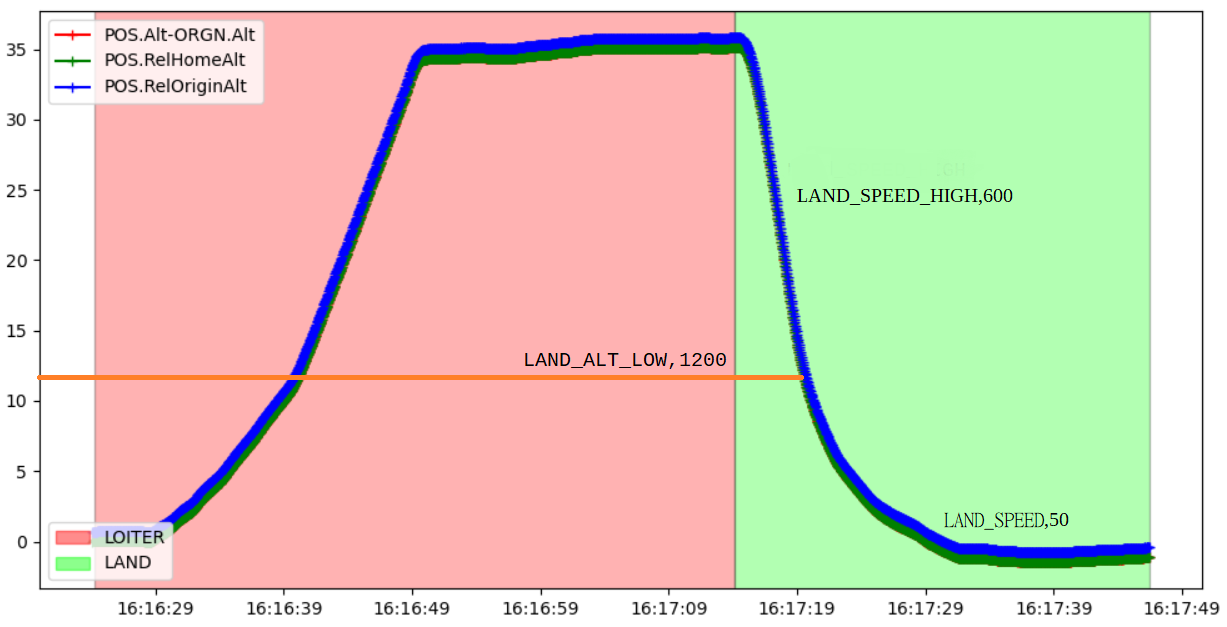
LAND_ALT_LOW,1200 / Land_SPEED_HIGH,500-600 → successful Land (see graph)
Can I control the deceleration between Land_SPEED_HIGH and Land_SPEED somehow?
Thanks for pointing out the WPNAV values; this is my next point for tuning ![]()