@D_S_S,
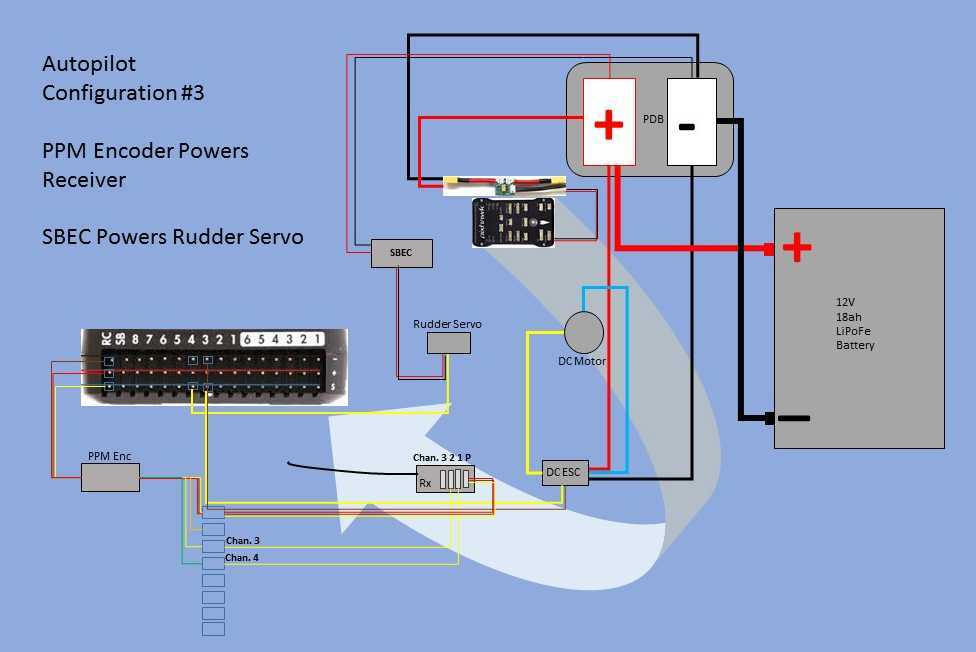
All of the PPM Encoders that I have power the R/C receiver that they are encoding so why are you powering the R/C receiver separately? Though some of the clone PPM Encoders require a solder bridge to provide power to the accompanying receiver.
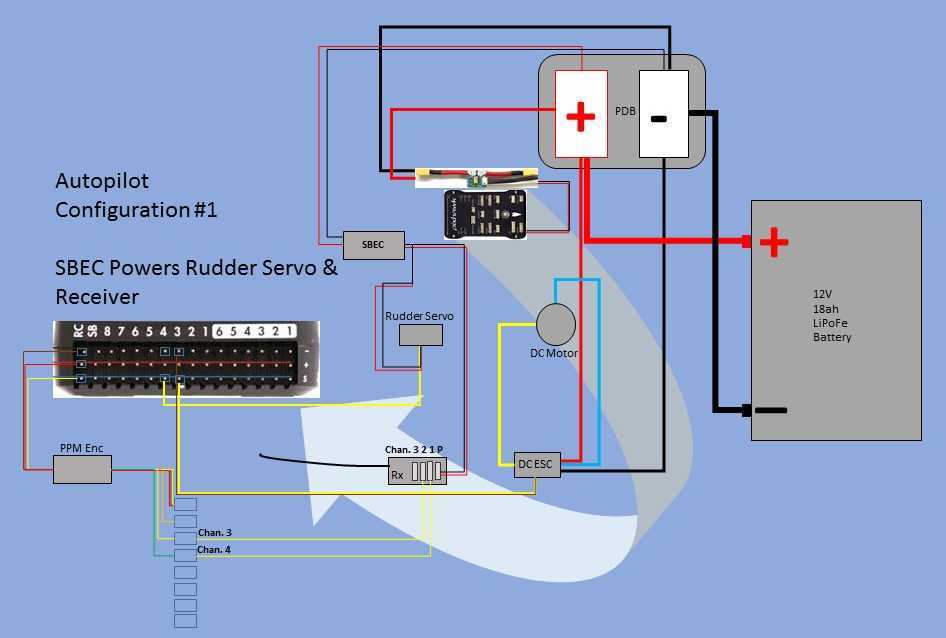
The PPM encoder wouldn’t power my receiver so I used an SBEC to power it.
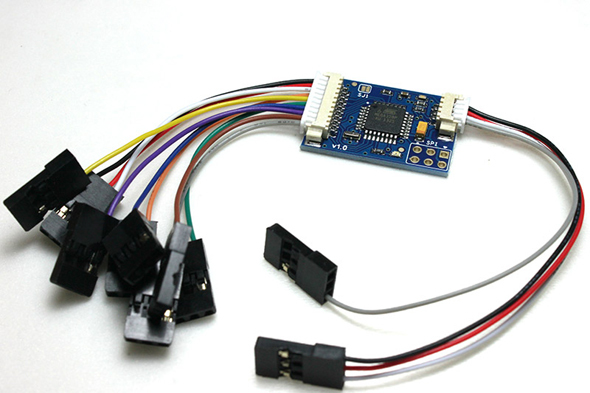
My PPM encoder looks like one of these. What did you mean by ‘some of the clone PPM Encoders require a solder bride to provide power to the accompanying receiver.’ and how would I account for that?
@D_S_S,
I meant a solder bridge and not bride.
The 3DR PPM Encoders by default would power the R/C Receiver. However, I have seen discussions on this Forum concerning the fact that some of clone PPM Encoders required a solder bridge between two pads in order to power the R/C Receiver.
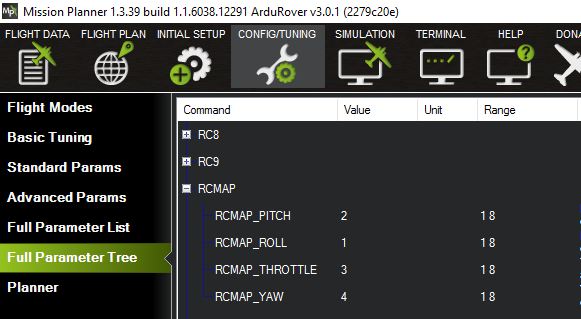
Please provide your RCMAP_X parameters and have you verified the operation of channels 3 and 4 in the Radio Calibration page?
Regards,
TCIII AVD
@D_S_S,
ArduRover’s default mode of operation is expecting to use the RCMAP_PITCH channel as the throttle channel for forward/reverse with neutral (stopped) when the Pitch stick is centered and to use the RCMAP_ROLL channel for steering right or left with straight ahead when the Roll stick is centered.
Regards,
TCIII AVD
Steering is usually on Channel 1 and Throttle on Channel 3. This is what you have configured (steering is Roll in Rover). Try plugging your steering servo into CH1 and see how you go.
You will need to ARM your rover before the throttle will work. Have a read through the arming info on the wiki.
Thanks for the comments guys. I did away with the PPM encoder & basic TXRX setup. Now I have a RX with PPM output and it seems to work. I think the issue was with the PPM encoder.