Apologies for probably a silly question, but maybe someone can tell immediately out of their head. I’m running arducopter SITL with AirSim. When I’m in alt hold and give the full throttle, nothing really happens. When I nudge the stick a bit it does work eventually (or it’s just coincidental). The controller has springed throttle so PILOT_THR_BHV is set to 1. Other than that everything is vanilla mode 2. Any ideas what am I missing as to why the demanded throttle isn’t raised immediately would be greatly appreciated!
Update and context.
I was working with a custom MavLink aware GCS the whole time. When I tried doing the very same thing in QGC it worked like a charm. Both of them use MANUAL_CONTROL packets, I sniffed the traffic a few times and there is nothing immediately suspicious going on.
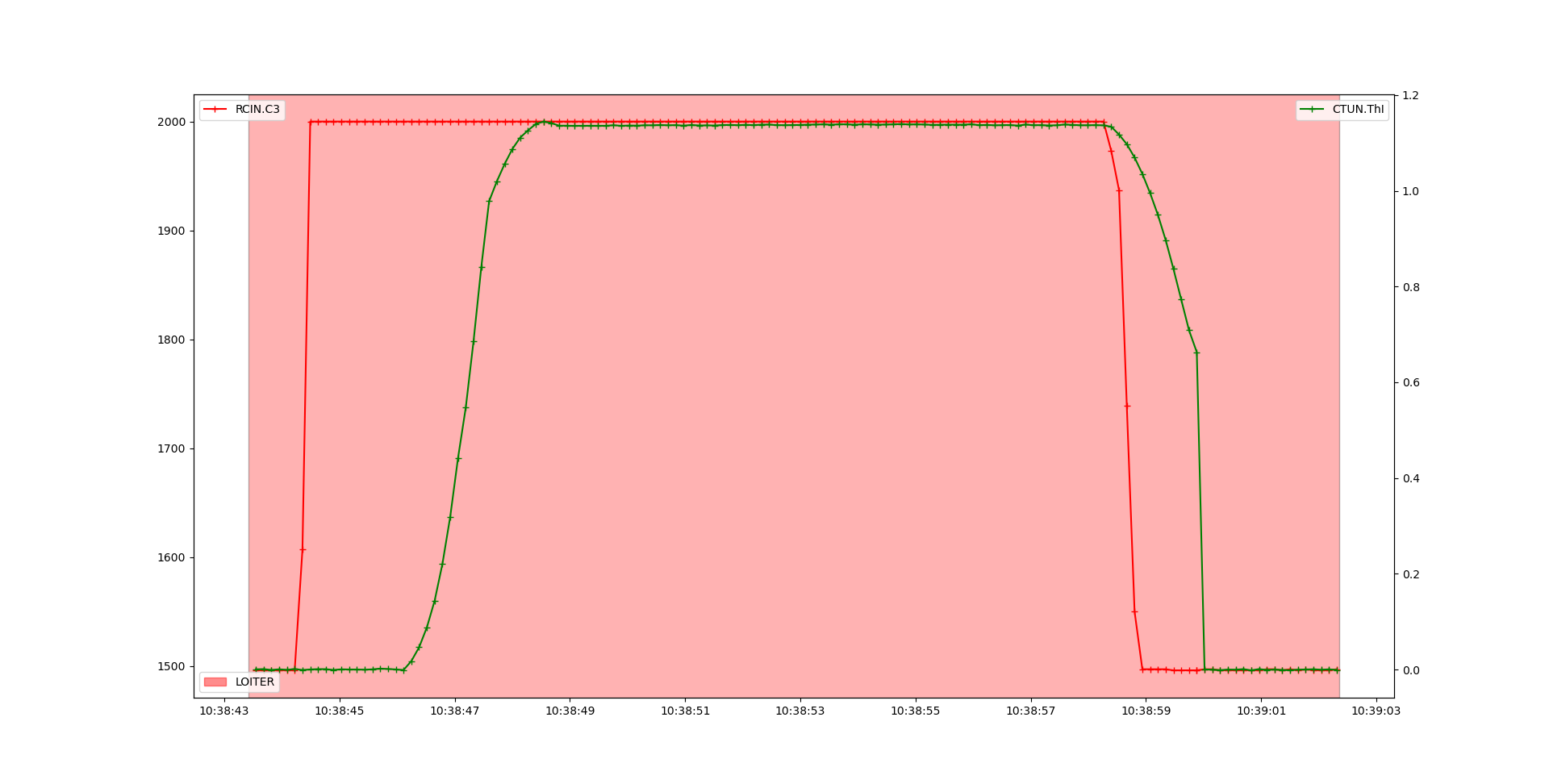
The only difference I can spot it the rate at which the throttle is raised to the top: in the GCS case there’s like 1-2 datapoints betwen 1500 (using mid-stick feedback) and 2000, whereas QGC probably smoothes things over a little bit.
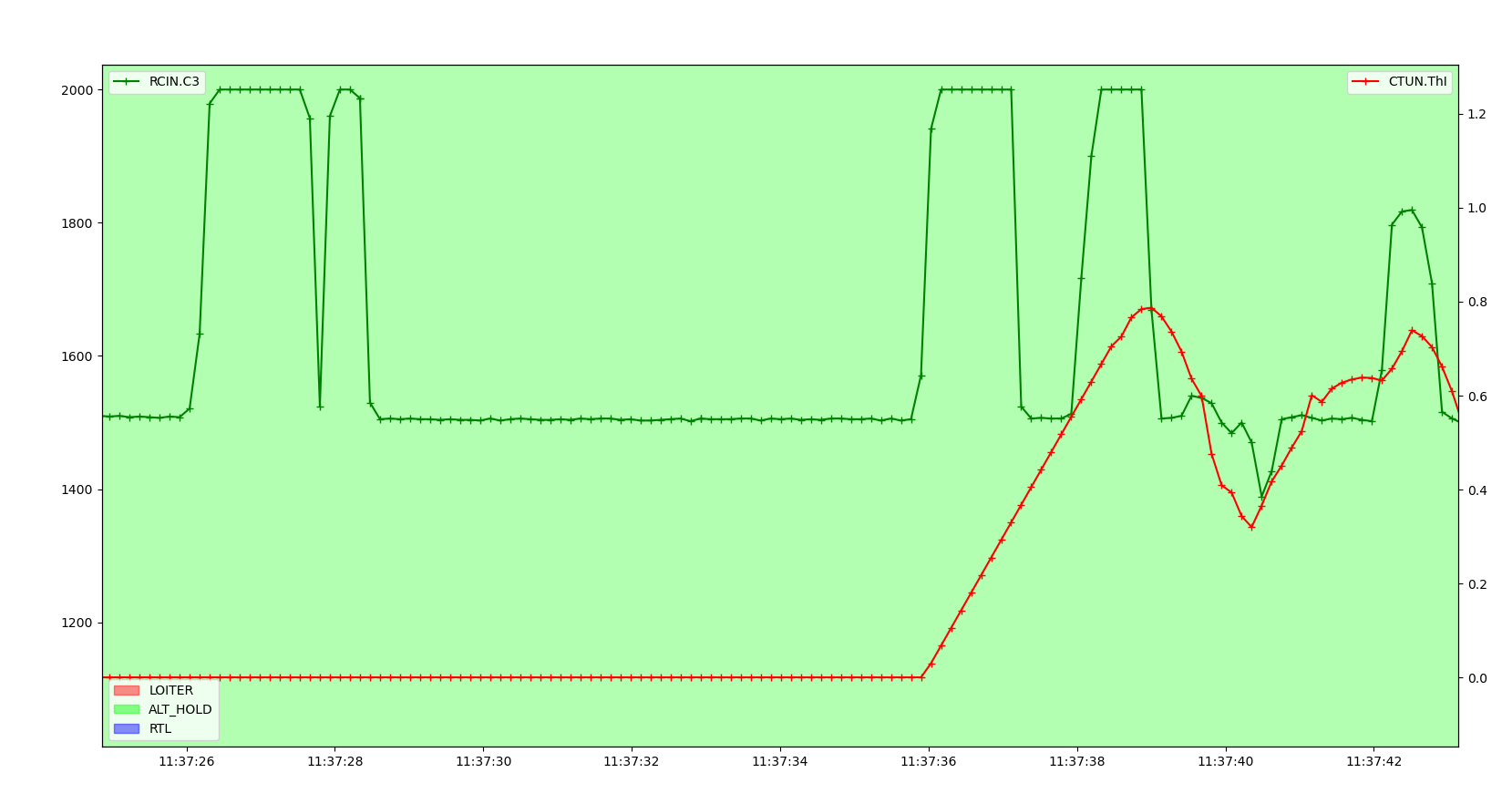
Here’s another example, throttle raised to max, but ThI isn’t registered as rising for a few seconds. I plotted servo outputs too but they generally follow ThI:
Running out of ideas at this point ;_;
hi man, just pass throuh. What happens when you full trottle slowly, for example from min to max during 3-5 sec? still nothing?