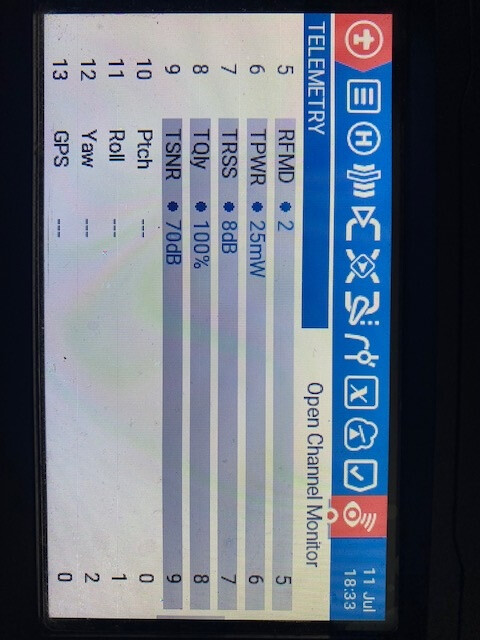
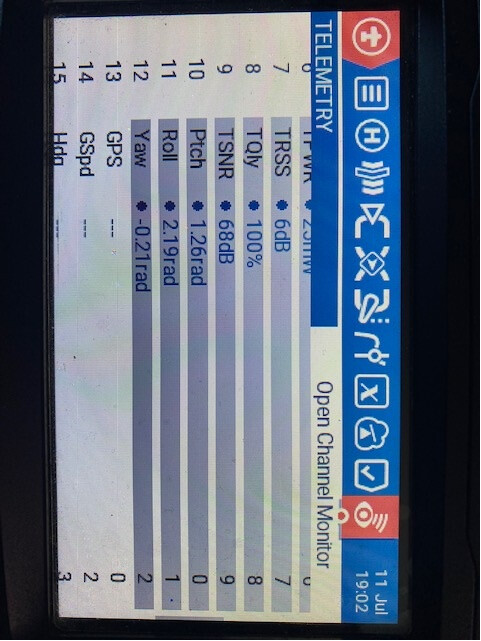
After upgrading no more telemetry data is on the display of the transmitter EdgeTX 2.7.1 eg. roll, pitch etc.
Only when configuring the CRSF protocol on the Crossfire NanoRX and SERIAL4_PROTOCOL, 23 I see the telemetry data back.
The strange thing is that RC over Mavlink and the Mavlink bridge in the transmitter work normally and I can receive all telemetry data on the groundststation when using Mavlink, just no telemetry.
SERIAL4_PROTOCOL, 2
SERIAL4_BAUD 115
Looks like a bug, or is a setting changed after upgrade?
Hi, I posted my parameters as used on my quad, but I don’t think it’s the parameters because:
In Arducopter 4.2.1
I resetted all the parameters to default on the flight controller
Than I only changed SERIAL4_PROTOCOL, 2 and SERIAL4_BAUD 115
After this RC over Mavlink works and the Mavlink bridge, but no telemetry on the transmitter other than the standard telemetry (RSSI, LQ etc.) that comes from the NanoRX I have no telemetry.
Than I reflashed to Arducopter 4.1.7
Resetted all the parameters again
Than I only changed SERIAL4_PROTOCOL, 2 and SERIAL4_BAUD 115
After this everything is working as expected (RC over Mavlink, Mavlink bridge and full telemetry on the transmitter).
Than after this I reflashed to 4.2.1 with the same parameters and the telemetry is gone again.
For testing puposes I also connected the NanoRX to SERIAL2 but unfortunately with the same results.
I have this problem on a Matek F405-SE with Arducopter and on my Pixhawk 4 Mini with Arducopter Heli, the NanoRX is connected to SERIAL2 on the PH4mini.
I noticed that I only have this problem in Arducopter and Arducopter Heli, I don’t seem to have this problem in Arduplane 4.2.2.
If you need anything else or want me to try something else I’ll be happy to test it out.
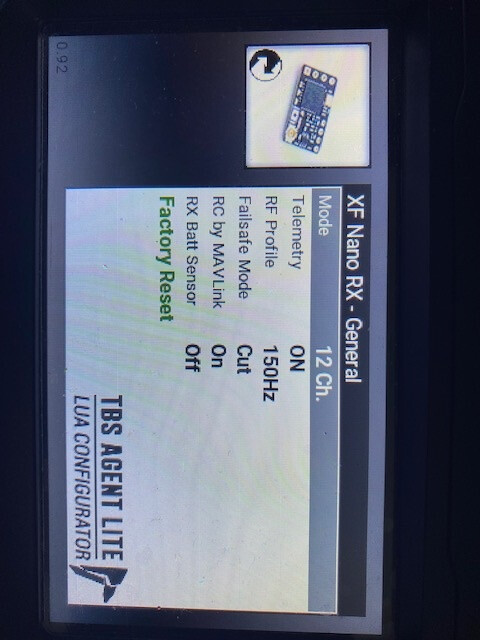
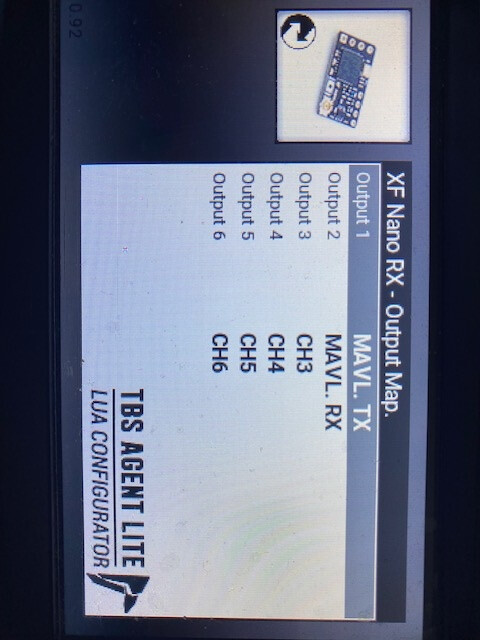
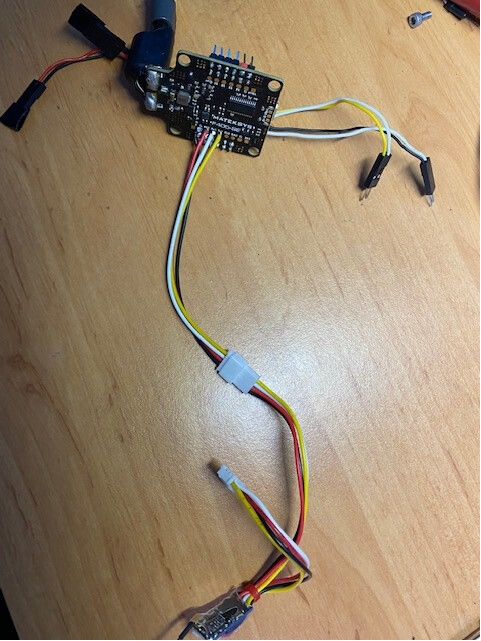
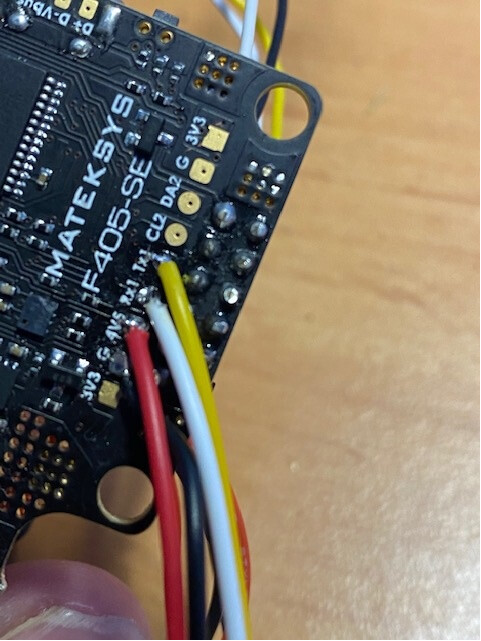
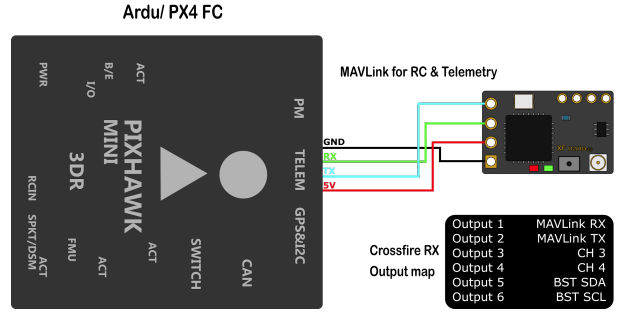
Can you show a picture of your wiring? RC over mavlink is a different thing to CRSF. Protocol 23 uses CRSF not RC over mavlink. Also show a picture of how AgentX thinks the outputs are configured.
What firmware are you using with this? According to the hwdef there is no DMA on SERIAL4 - you will need to use SERIAL1 or SERIAL3
I connected the NanoRX receiver according to the TBS manual to SERIAL1 and I only changed SERIAL1_PROTOCOL, 2 and SERIAL1_BAUD 115 after resetting all the parameters to default again on Arducopter 4.2.1, with unfortunately the same result.
Then again I reflashed the flight controller again with Arducopter 4.1.7 and all the telemetry worked again.
So something definetely changed in the code that won’t make it work anymore. If this was hardware related it wouldn’t work in 4.1.7 also.
Than also for testing I loaded Arduplane 4.2.2 on the same flight controller and only changed this SERIAL1_PROTOCOL, 2 and SERIAL1_BAUD 115 and everything worked just fine.
Than also for the ultimate test I loaded Arduplane 4.2.1 on the same flight controller and only changed this SERIAL1_PROTOCOL, 2 and SERIAL1_BAUD 115 and everything worked just fine.
After that I reflashed Arducopter 4.2.1 again same settings and not working.
In you config you had SERIAL4_PROTOCOL,23 which is not correct with this setup - you would need to use SERIAL4_PROTOCOL,2
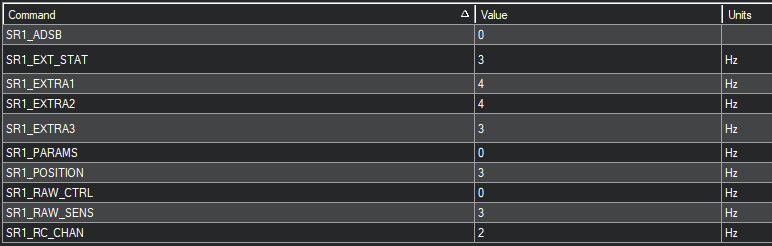
So this is a mavlink question - I suspect that what you need to do to get telemetry is change the SR1_* or SR2_* parameters - this is what controls the telemetry rates of data over mavlink,. You have them all at 0 so I think no telemetry. Note that the numbers correspond to the number of mavlink channel, so 0 is your USB connection, then in your config 1 is SERIAL2 since you have that configured for mavlink and 2 is SERIAL4 (if you configured it for mavlink).
That said few people set up RC with XF like this these days - better to use direct CRSF input. So change the XF nano outputs to CRSF TX/RX and use serial protocol 23 - but to do it this way you would need to use a DMA enabled uart.
You were right, I changed the SR1_ parameters so they matched the SR0_ parameters and now telemetry is working again.
Appearently this is changed in the 4.2.1 release of only Arducopter.
I prefer Mavlink over the CRSF protocol, because with this setup I can use the Mavlink bridge to the GCS functionality that I don’t have with the CRSF protocol.
In my parameters list you found SERIAL4_PROTOCOL,23 because of a test I put that there.