I have a uBlox F9P GPS configured to send out NMEA data on Tx1, which I have connected to Rx3 on the H743. In Mission Planner, I get No GPS.
On the uBlox GPS setup, should I be sending NMEA, RTCM3X, or both?
In Mission Planner, I have set up SERIAL3_OPTIONS to 0, and SERIAL3-PROTOCOL to 5. Both baud rates are the same. GPS_TYPE is 1 ( Auto ).
I’ve set up that uBlox to get RTK corrections from another uBlox at a fixed station, thats all working so dont want to clear all that setup out.
Checked the wiring with a cro, definitely getting serial data from the uBlox to Rx3 on the H743.
Unfortunately it seams there is no easy way to reset the F9P to factory settings.
Couple of questions. I’ve read the FC will only try to read the GPS on startup, so I would need to power down/up after each change to see if it works? And is there a way to see if the FC can see data, any date, on a serial input?
My mission this weekend was to get at least the GPS working on this thing.
Yes, it’s a very common configuration. I’ve used probably a dozen F9P modules on various vehicles with any number of H743 based autopilots, including those from Matek. They work first time, every time when wired and configured correctly.
Autopilot pin numbering can be confusing. The reasons for this are many and varied, but the short story is that it provides continuity in hardware definitions, pin grouping/capability, and/or wiring diagrams across many products, and manufacturers are not bound to silkscreen label standards on their PCBs.
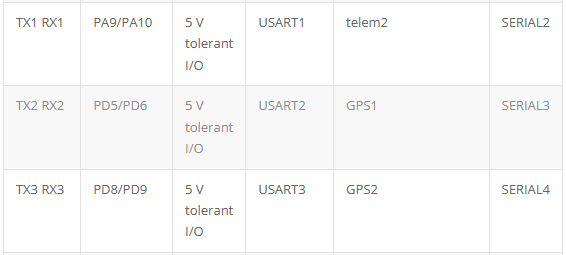
This is from Matek’s product page:
So, if you have the GPS soldered to TX3/RX3, you need to be using SERIAL4 parameters. If that is the case set the following:
Leave the rest of the parameters at their defaults. The baud rate parameters are irrelevant - ArduPilot auto detects the data rate for GPS modules.
In Matek’s defense, their own wiring diagram shows a uBlox GPS connected to TX2/RX2, which works perfectly on the default parameters, and they explicitly list the ArduPilot pin mapping on their product page.
Now, so long as your RTCM3 source is compatible with the preconfigured UART2 baud rate on the F9P, you’re good to go.
EDIT: A quick browse through the source code seems to indicate that if you aren’t using a moving baseline configuration (GPS for yaw), auto configuration won’t touch the F9P’s UART2, so you can set that however you need in uCenter for the RTCM3 config that you’re using. Don’t hold me to that as hard fact, but I don’t see anything to indicate otherwise.
sounds like you are sorted.
Ardusimple simplertk2b is excellent - but one of the UART connections has the labelling for TX and RX swapped TX2 and RX2 from memory - something to do with the XBEE wiring.
Mission planner if you are using it, does a great job of sending correction data from a number of sources.