Hi there,
my name is Steffen, I am from Germany. I started with Arduplane nearly 2 years ago, but never flew because of
a broken pixhawk lite (no servo output at all). No I have a E-flight Opterra (actually its the second one…) with 4s 6300mAh stock ESC and motor + prop. Installed is also a M8n GPS at the back (no compass connected) and a M7n GPS with only the compass connected at the nose. (Only rear GPS working so far). I still have some issues, nonetheless, it now flies really well! I am super happy about Ardupilot!
My problem is, in Cruise mode, the plane is not giving full throttle (or at least, the ESC dose not output full throttle). When I switch to RTL the plane puts out full power to climb to loiter alt (max. current with 4s is approximately 40A with original ESC and pro).
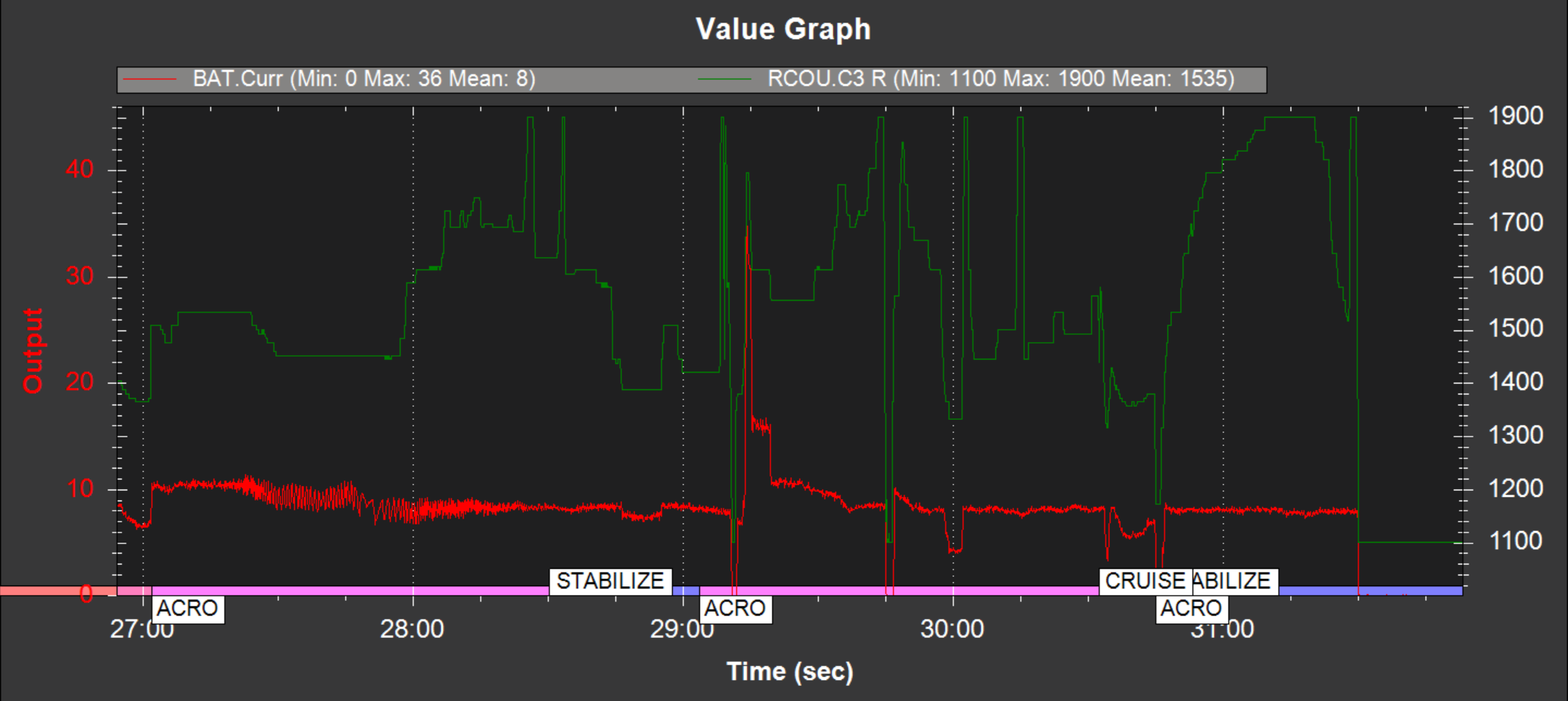
In the picture below you can see RC_out of Channel 3 (motor) and the motor current. As I understand, I should be possible to give full throttle in stabilize and in Acro. But both did not work. In Acro, I worked once, after putting throttle to zero and then back up to max. This dose not work in cruise mode, I already had a death spin because of insuciffent air speed and easly can repate it by simply pullig full up (climbing should be 15m/s - too high?), because the plane will pitch 45 degree up, but not give more power.
The Throttle settings are:
Cruise: 35%
Min: 0%
Max: 100%
Slew Rate: 100
Airspeeds are:
Cruise: 12m/s
FBW min: 9m/s
FBW max: 30m/s
Airframe can do something between 5m/s to 33m/s
Appreciate your help and thoughts on this 
 So I will make a cooling hole in the back of the plane, the ESC has written 40A on it, so it should be able to handle it?
So I will make a cooling hole in the back of the plane, the ESC has written 40A on it, so it should be able to handle it?