I never said that. I have flown several AC rc candidates and this is the first time I have encountered such a glaring and potentially dangerous disconnect between AC and MP. The bottom line here is, if I cannot put any confidence in what MP is telling me, how can I put any confidence in what I tell MP to do? And, by extension, if I cannot “trust” what I tell MP to do, how can I trust that AC will do what I told MP to have AC do?
And while we are on the subject, out of all of the people who have downloaded and installed AC3.6rc1, how many have complained about this particular issue? Its danged few because only a few of us are willing to do our due diligence and look at EVERTHING before we fly.
@OldGazer
I do understand your frustration but MP and AP are two projects and it’s normal that in some point in time they diverge and then come back.
We are talking here about testing the beta versions and not everything will be working. If you are not willing to accept the fact, it’s your choice not to test the beta and wait for the final release.
The devs are doing a great job and there are plenty of new features in these release that make me eager to try it right away but if anything bad happens it’s my call in the end and the risk I wilingly accept.
You found a missing crucial feature in MP not in ArduCopter so please report it there and don’t just pick it up with the devs.
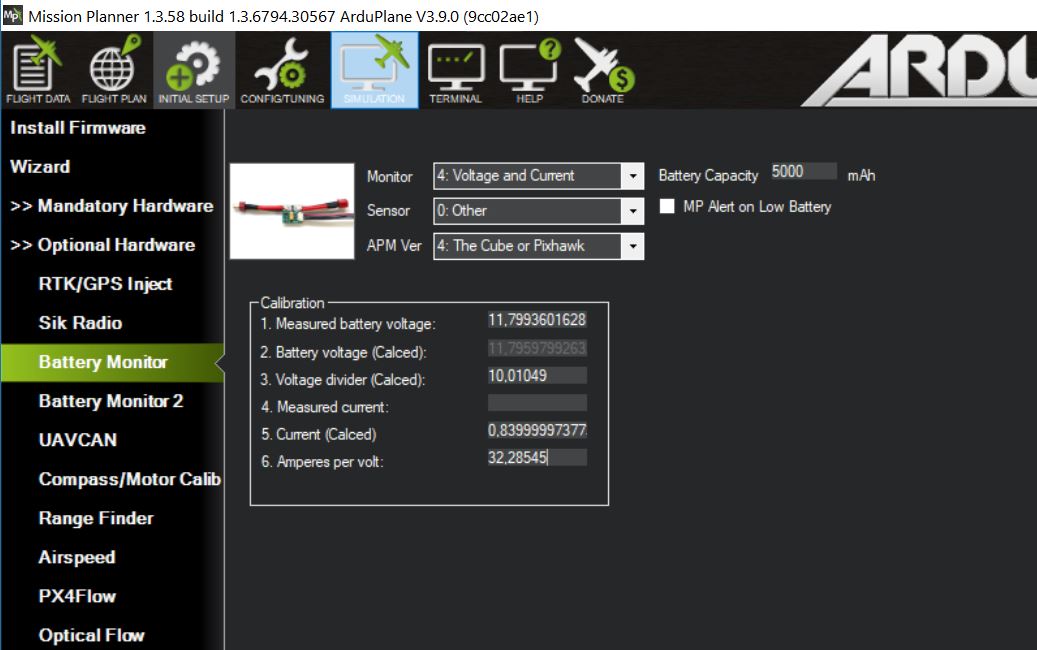
The childish GUI representation of parameters have several times caused serious configuration errors, this is one time it works as expected, not showing items that are not there.
If you needed full GUI for everything,most likely, you can’t even find most new features and flight modes in it at an early stage.
I get that, and some one has already posted a comment to MP about it.
I know these things take time to get right, and the Devs on both projects are doing a stellar job, but I was really surprised by the fact that apparently no one saw this particular issue before rc-1 went live.
By the same token, if this was a known issue, then why didn’t some one at least post an "Oh, by the way, you cannot use MP to change Battery Monitor and Battery Failsafe settings, but you can change their parameters manually. The new parameters are: (insert list here).
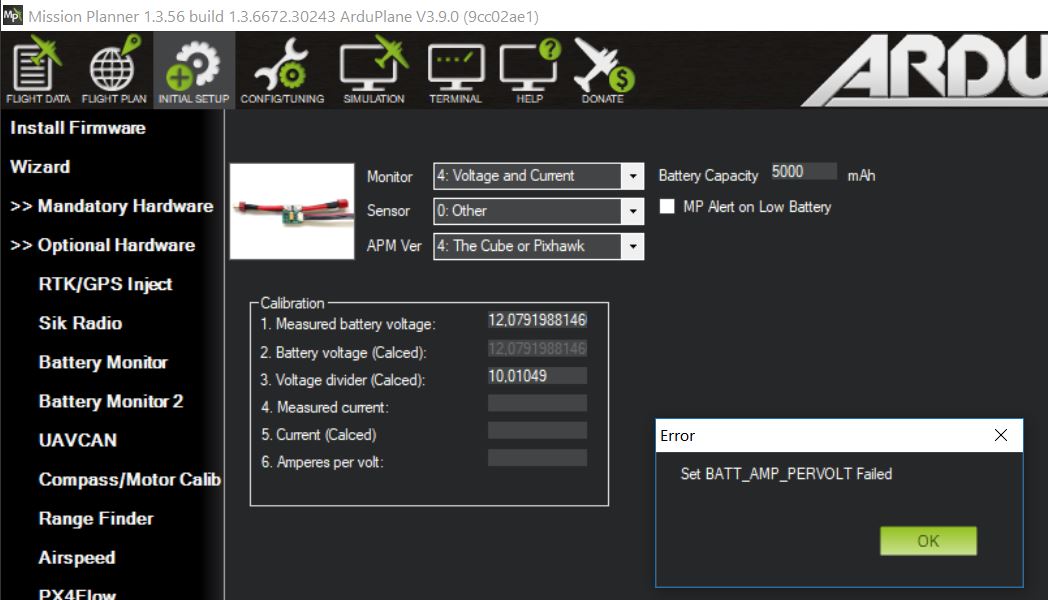
I understand what beta testing is all about, and I was fully prepared to run across some surprises. What I wasn’t prepared for was finding what appeared to be very serious and perhaps dangerous issues with battery monitoring and fail safes and so I sounded the alarm.
hmm the releasenotes for copter says
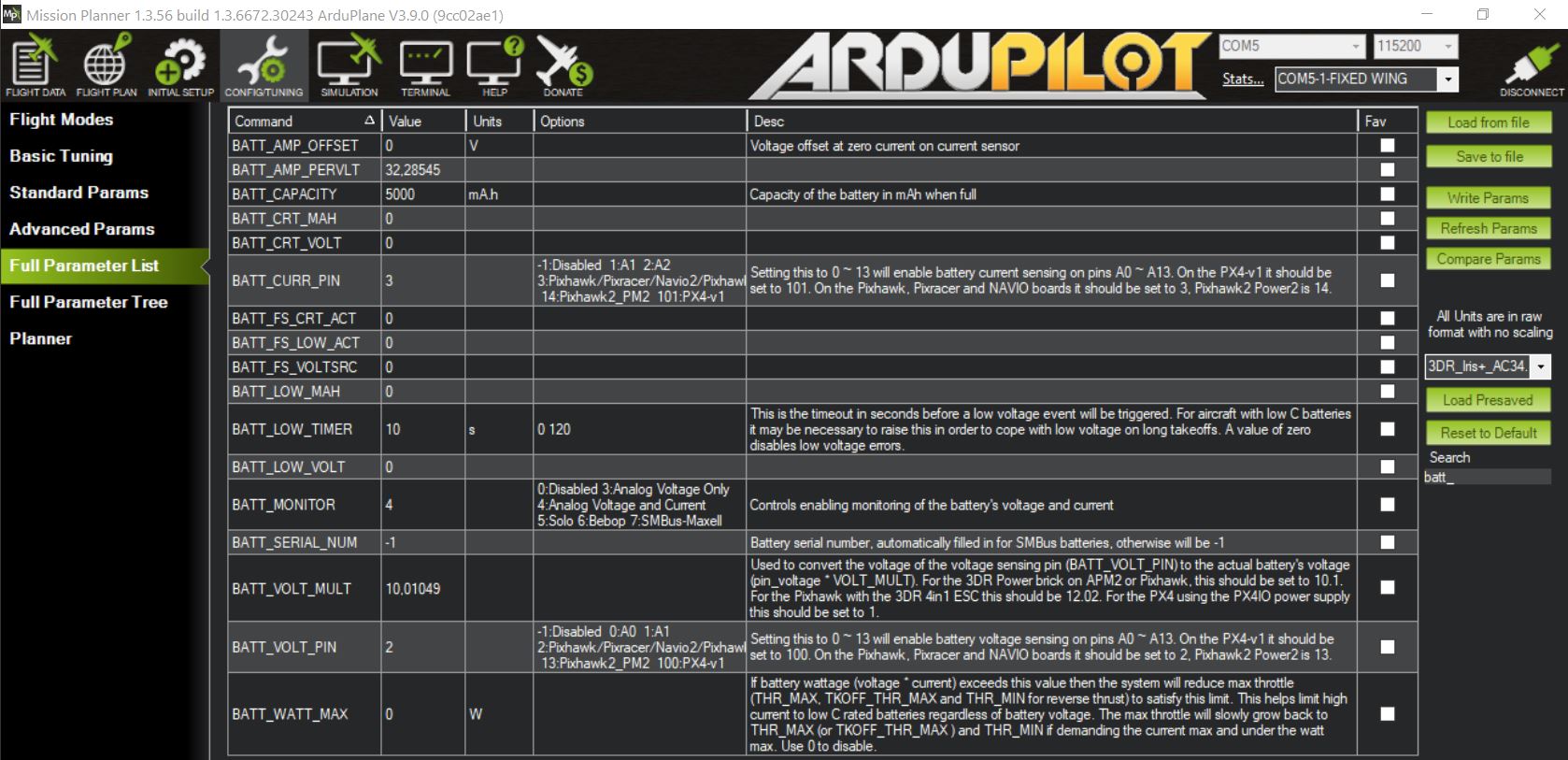
f) BATT_AMP_PERVOLT renamed to BATT_AMP_PERVLT
But I don’t see how that would affect Plane, perhaps Copter was just catching up to Plane, because the Plane wiki shows it different than what you posted in plane as well…then again you posted in the #arducopter:copter-36 forum…