I am trying to use the Here3 GPS and HEX Cube Orange with Ardupilot (Copter 4.3.1 Official) firmware for my drone but so far I am not getting any signals or 3d Fix from the GPS. I have been using Mission Planner (V1.3.79) as the ground station software. It would be great if I could get assistance in solving the GPS 3D fix issue.
Below are some of the steps I tried until now to get the 3D fix.
modified the parameters in Mission Planner (as instructed in the official website)
updated Mission Planner and the Here3 GPS (as instructed in the official website)
changed the CAN node ID
tried to connect to u-center (doesn’t show any satellites though)
checked in both inside my house (closed space) and outside (open space)
Please let me know any additional information I need to provide too.
That log has a lot of
“EKF3 waiting for GPS config data”
and no GPS in the logging.
It’s like the GPS CAN connector is plugged into the wrong port, or wiring is wrong.
Have you got a photo?
Set both GPS_GNSS_MODE and GPS_GNSS_MODE2 to only use two constellations, usually GPS and one other. Also select SBAS if you are in USA
I have just connected the GPS to the Cube Orange controller and connected it to my computer via USB.
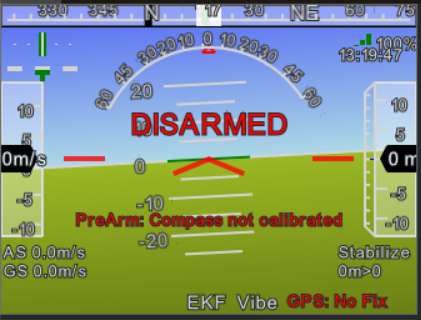
The GPS light in the images seems yellow but actually is green.
I tried setting the GNSS_MODE as you mentioned, but still cant see any GPS signals.
I tested the same connection outside with full view of sky. But still shows No Fix. Tried both CAN ports.
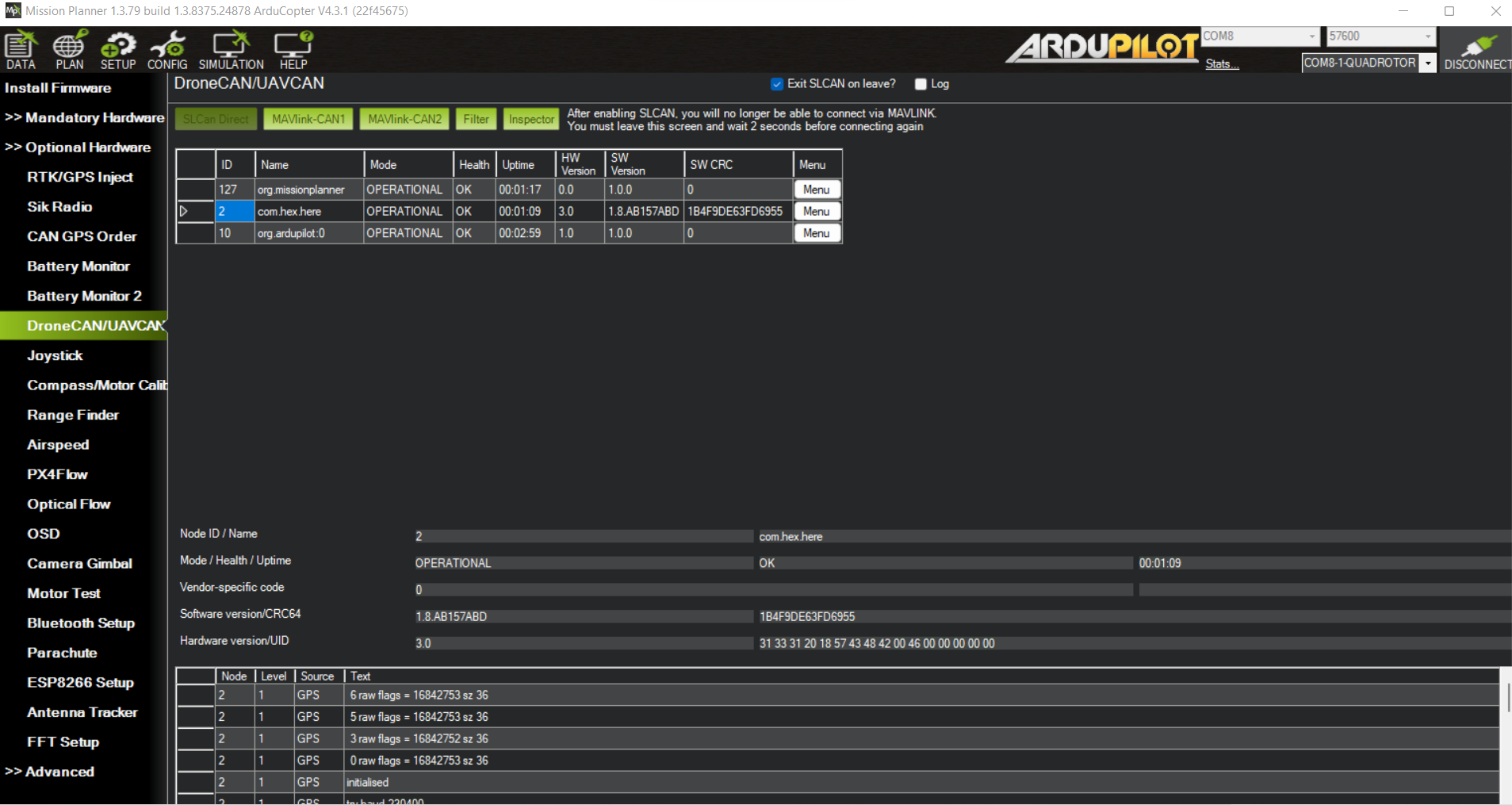
Although, I reset all the CAN parameters to default and now itseems Mission Planner can recognize the GPS but shows No fix as can be seen in the image below.
Now, when I restart the GPS, I can also see messages such as ‘6 raw flags = 16842753 sz 36’ at the bottom of the DroneCAN screen. Attached image for your reference.
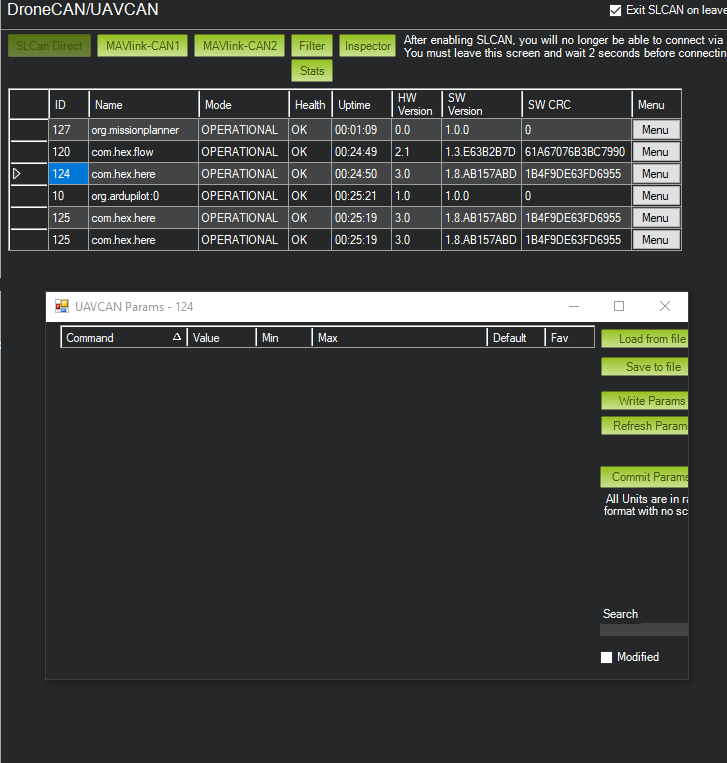
I would like to resurrect this thread. I have basically the same problem. Using Orange cube. Here 3 GPS, i happen to have 2 of them. The CAN compass page shows them, the DroneCAN page shows them.
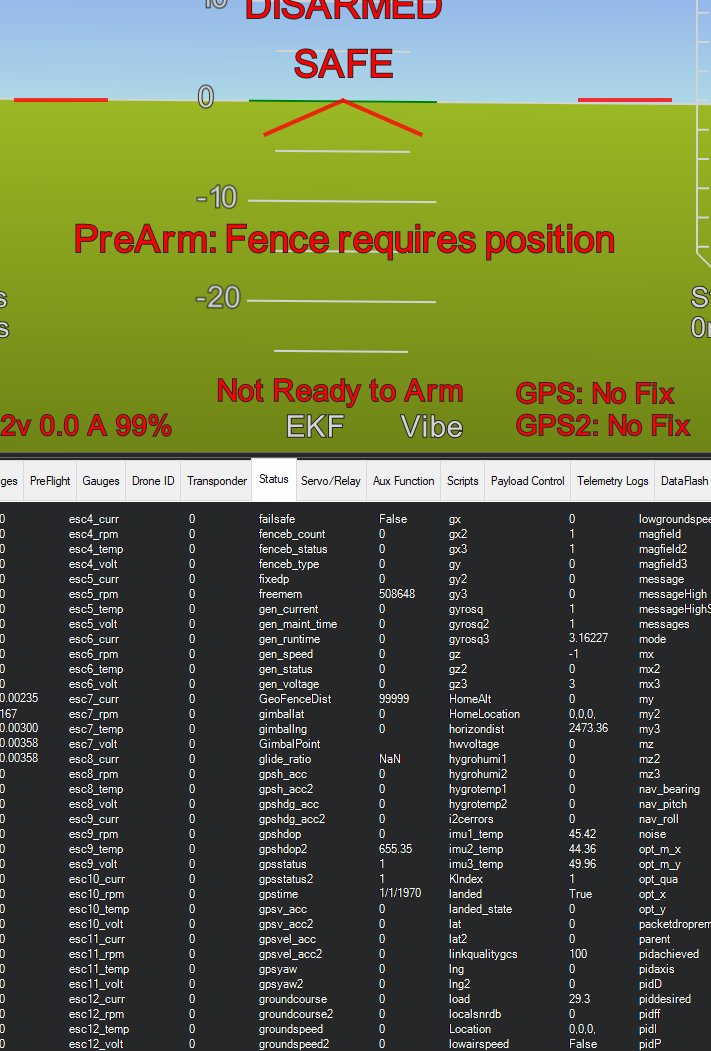
On the Data page it shows 2 GPS’s, but both say no fix.
I purposely showed the status page here for the GPS stats. The gpshdop2 showing 655.35, it has always shown that, so seems like its not a true reading.
I went through the process of defaulting my FC, and then Firmware, and lots of pain getting perif’s working again. Got to what I described. Also i can get them to show in the dronecan page, but the parameters page almost never shows any params.
Their compases both calibrate just fine. Its like CAN is working, but its not passing GPS data. I have tried ‘everything’.
I have an CAN based Optical flow sensor, with rangefinder, and it works fine, so CAN itself seems to be working, but for some reason not getting GPS data passed to MP.
Also not sure why device 125 shows twice, but it always does. Tried the database reset option, but it doesn’t seem to actually clear the database.
I hate to ask the painfully obvious, but too often we see this:
Are you outside with a clear view of the sky? Your modules are clearly detected and likely functioning, but without a good view of the sky, all other troubleshooting is essentially moot.
Set SERIAL3_PROTOCOL and SERIAL4_PROTOCOL to -1. You aren’t using serial GPS. This isn’t likely the root cause, but it isn’t helping.
On top of that, i have a small fairly cheap Frsky GPS unit that sends telem to radio directly, sort of a backup, and it get coords just fine, and thats even with the drone in my trailer.
Turning off serial ports didnt help, as expected.
Here is a new params file. Shouldn’t be much changes, but i have messed with lots of stuff.
I have a side question, because I’m trying to use 2 GPS’s, and other CAN devices, should both CAN drivers be set to driver 1, and should CAN 2 be Driver 2?
1 device at a time didn’t help either. Its like the Sats are running from me, lol. Everything seems to work, other than I am not getting GPS data. The fact that both GPS’s act the same makes me think its something in the settings, but i can not find it for the life of me. Very frustrating, this thing is so close to flying, once i get this fixed.
I also tried using the U-center Ublox app to update firmwares on them, but it didn’t seem to work. I probably missed something.
Directly assigning ID’s made no change, so set it all back to defaults (Auto)
If i plug them in one at a time on CAN 1 i can get to their params page, and made sure all settings where set to default. Was also able to update them via MP.
I happen to have two Here 3+ modules and a Cube Orange+ on the bench, provided for expressly the purpose of troubleshooting issues like this. I cannot reproduce your issue, and I don’t think it’s because I’m using (potentially) slightly different hardware.
Steps I took:
Loaded Copter 4.5.3 stable (bdshot) onto a Cube Orange+ and set default parameters.
Loaded your last set of parameters (rebooting twice and re-uploading your parameters to ensure all enable parameters were set as you have them).
Reset both Here3+ to factory defaults and updated firmware.
Plugged 2 x Here3+ into a single CAN splitter on CAN2 (the only one exposed by my carrier board).
Rebooted clean and waited several minutes with the bench test rig outside for full auto configure and satellite lock
Got 2 x 3D Fix
Repeated multiple times with no change in behavior
No, you do not need to change any CAN parameters.
You may try plugging both modules into CAN2 to see if that makes a difference.
Wait at least 15 minutes with the autopilot powered on and both antennas placed outside and unobstructed before reaching any further conclusions.
I would agree the difference in hardware is probably not significant.
If you wouldn’t mind could you go a little deeper into how to factory default, and firmware update the GPS’s? Is it what i already did? Default params in MP, use the updater in MP?
Default parameters for DroneCAN devices should be displayed in Mission Planner when connecting via the DroneCAN interface. Unless you’ve done something weird, they should be at defaults. I’m always doing something weird, so that step was really just assurance to both of us that my config should match yours.
Likely beyond the scope of what you need to do, but autopilot defaults can be achieved in one of several ways. The easiest is a button to do just that within Mission Planner’s full parameter list page. Again, that step was to ensure that I could match your config and not something you should need to do.
You are my hero right now. I wired the devices how i want them. Then i followed your directions to a T. Had to enable CAN drivers after, and like magic they both give me 3d fix now. I have been fighting this for days, couple weeks at this point.
Don’t know what the problem actually was, wish i did for future folks, but its works now.
Glad you got it sorted. I really only parroted the manufacturer’s recommended setup in slightly different words. No idea why you had so much trouble, but at least you can move on now!