Hello everyone, i want to tell how your can receive depth data in ardupilot from fish finders Lowrance Elite7 and HDS. Maybe this method would work with other hi-end fish finders like Hummingbird and other.
I hope this information can help to someone and i need help too.
Here the basic information about system and later i’ll make step-by-step instuction how to.
We will send and reicev NMEA messages through WiFi. It’s not easy, but profitable.
Hardware:
Pixhawk with ardurover 4.1.1 on board
Raspberry Pi 3b+ with official RPi OS Lite on board
Lowrance Elite7 Ti-2 with 3-in-1 transducer
USB to UART FT232RL
GSM modem for long range telemetry
Additional software:
On RPi
Kplex - for routing NMEA messages (Kplex: An NMEA-0183 Multiplexer)
MAVlink Router - for routing telemetry (GitHub - mavlink-router/mavlink-router: Route mavlink packets between endpoints)
Zerotier - for VPN connections https://www.zerotier.com/
On notebook:
Zerotier
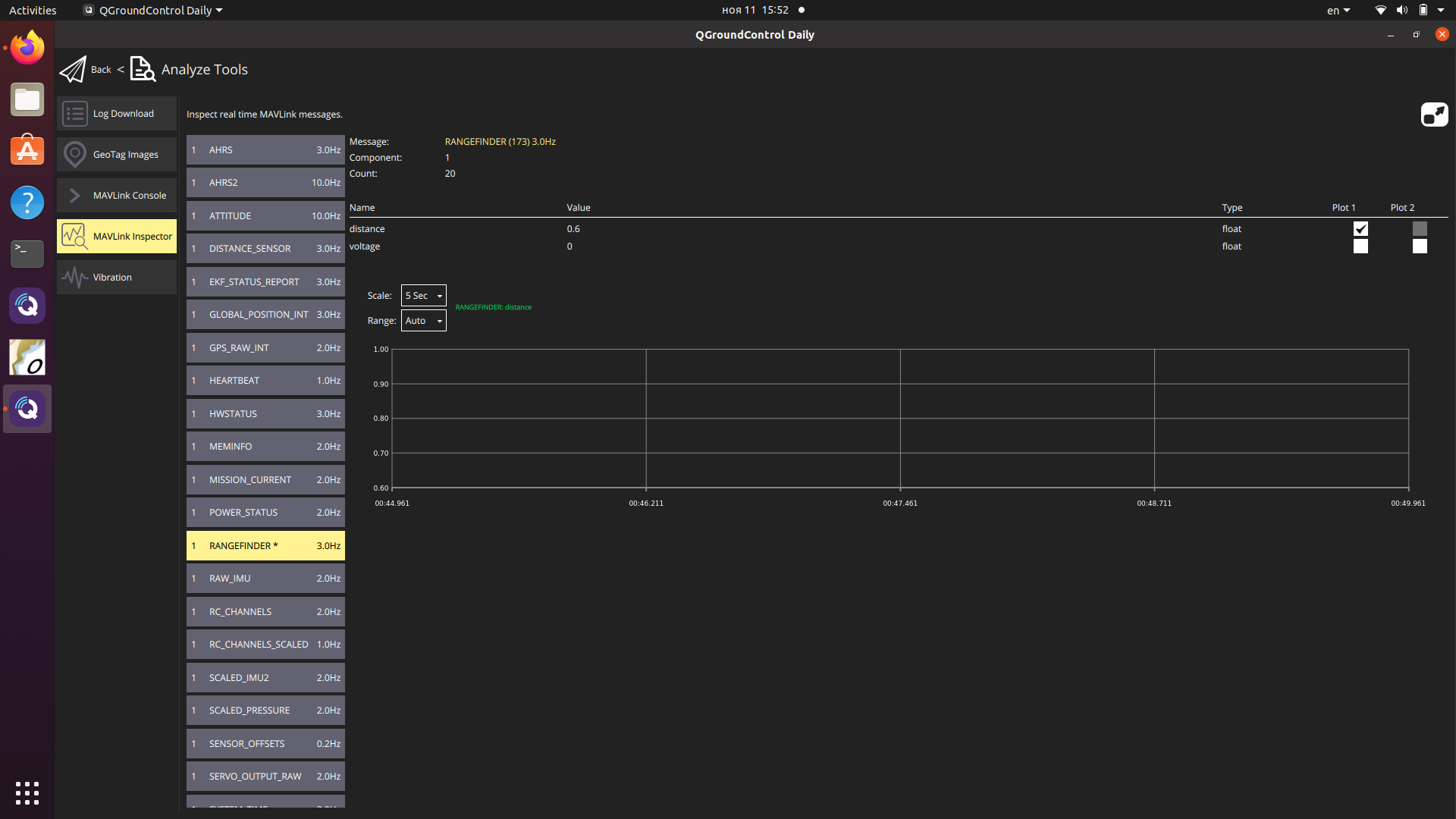
QGroundControll - for ardupilot setup
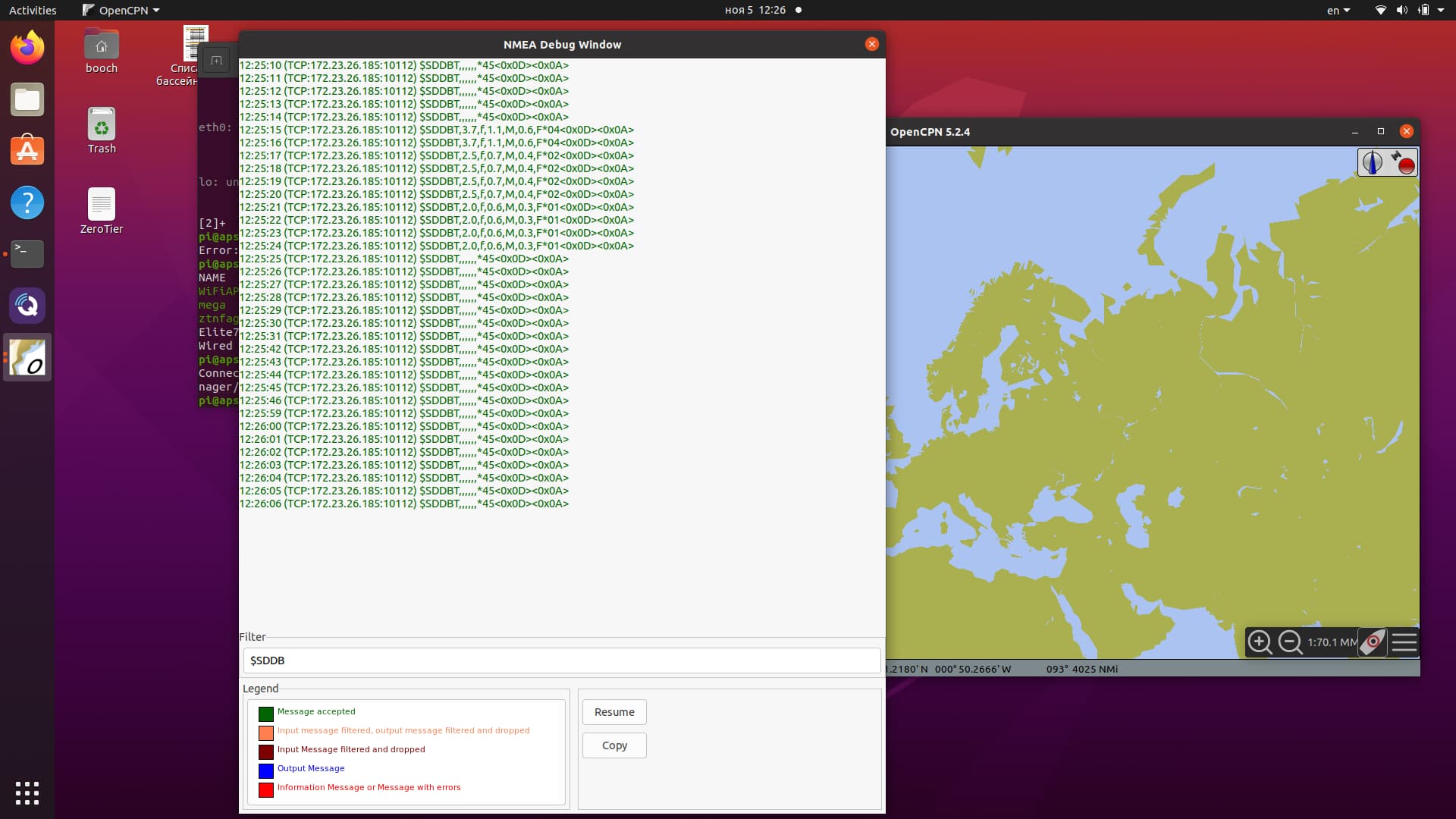
OpenCPN - for cheсk NMEA messages in userfriendly format
Setup:
Lowranse Elite7 - in settings - Wireless - should be turned on Build-In WiFi and Build-In hotspot (better to change AP name to something without spaces). In settings - network - NMEA0183 - turn on Serial output.
RPi should be connected to Lowrance WiFi (I’m using NetworkManager on RPi for this)
FT232RL connected to usb on RPi and to serial4 on Pixhawk (no need additional setup, work from bow on RPi). For ardupilot setup you can use this wiki page KOGGER Underwater Sonar — Copter documentation
GSM modem connected to RPi (new modems should work from box, for old you need to google how to properly setup your modem)
About telemetry through RPi you can find on this wiki page APSync — Dev documentation
Kplex - please read their manuals. You need route messages from Lowrance WiFi to two destination - FT232RL and your network. Beter to use klpex configuration file.
MAVlink Router - please read manual on their GitHub page. It’s not easy, and maybe beter to use prebuild images (APsync, Rpanion) for telemetry through RPi